
|
|
| Elliott Sound Products | Relays & How To Use Them - Part 2 |
 Main Index
Articles Index Main Index
Articles Index
|
The introduction to relays article covered the coil, driver circuits and discussed contact materials and ratings. This is Part 2 of the article, and looks at the contacts in greater detail. In particular we'll examine the many and various ways that the contacts can be damaged by and protected against arcing. Not by using specialised devices though - this section just covers the ways that readily available relays can be used to break 'difficult' loads without too much stress on the contacts.
There are countless different loads and supply sources of course, and it's only possible to look at general principles. Some are 'text book' examples that have been used for many years with reasonable success. These are the circuits that you'll often see in product schematics and application notes, and they generally give quite good results.
AC loads can be especially hard if the load is inductive. Transformers and motors fall into this category, and there are some tricks that can minimise inrush current upon connection and 'flyback' voltages when the relay releases. Even some resistive loads can cause problems, particularly if the load is incandescent lighting which causes a very high inrush current. In some cases it will only be possible to get very reliable zero-voltage switching operation by using a solid state relay (SSR), but even electro-mechanical relays can be surprisingly accurate if you are willing to add a micro-controller that monitors the AC phase and verifies the relay's operating timing.
The science behind contact materials is very involved, and I don't have the necessary equipment to examine contact surfaces at the molecular level. Some of what you will read below might sound like science fiction, but the references will show quite clearly that these effects all exist, however unlikely they may seem. If you have access to a microscope you can look for yourself, but to see the real problems you need an electron microscope - well outside my price range. 
Some relays have what is called 'bifurcated' contacts. This simply means that the contact arm is split in two, with contact material on each of the two sections. Depending on how it's done, this can reduce contact bounce if the two sections are of different widths and therefore have a different mechanical resonant frequency.
Solid state relays (SSRs) are also covered here, and primarily those using SCRs (silicon controlled rectifiers) or TRIACs (bidirectional SCRs). The common term for these is thyristors, which is a contraction based on the combination of the vacuum tube version called a thyratron + transistor. These devices offer exceptionally fast switching, and come in a wide variety of different styles. Because they are semiconductors, in most cases you need to include a heatsink to maintain the operating temperature below the rated maximum. In some cases you can replace an EMR with an SSR, but there are design rules that must be followed to prevent failure of the SSR, the load, or both. The general principles are covered, but it's not possible to explain everything in a single article and I have no intention to even try. There are entire books written on the subject, so I can barely scratch the surface.
The following is adapted from a relay datasheet [ 8 ], and shows the derating curves for both AC and DC operation. For the relay to meet its life expectancy, the current and voltage must not exceed the limits shown by the red curves. Should the ratings be exceeded, the relay contacts will be subjected to arcing that will either reduce the life or destroy the relay contacts. A serious overload (e.g. 14A at 56V for a power amplifier DC protection circuit) will destroy the relay - probably the first time it's used!
The graph shown above is quite possibly the most important graph you'll ever see when it comes to relays switching DC. The relay itself doesn't matter very much, because the only thing that normally changes is the maximum current. The data can be extrapolated for higher current relays, but unless that datasheet specifically provides a similar graph showing higher DC current switching capacities, assume that 30V DC is the maximum permitted voltage for rated current. The current derating required at higher voltages is very clear. At 40V DC, the allowable current is reduced to less than 2A, with an absolute maximum voltage of 100V DC at 500mA or less. Ignore this at your peril.
Relay ratings and limits are not subject to argument, and nor do they indicate that the ratings can be exceeded at the expense of contact life. These limits should be considered absolute, and if a relay contacts ever create a sustained arc, the relay is ruined. The photo in Figure 4.0 is a perfect example of a catastrophic failure. This can occur the very first time the relay is operated at excessive voltage and current - there is no 'second chance'.
The contacts of most relays are designed to slide a little as they open and close. This process helps keep the contacts clean, and is designed to remove oxides, sulphides and other contaminants from the surfaces. When a relay manufacturer specifies the maximum number of operations (typically between 100,000 and 1,000,000) this may be referring to mechanical life only, where the contacts are 'dry' (not carrying current). Sometimes you will see two figures, one being the mechanical life and the other being the life at full rated load.
Reed relays are an exception, as they are hermetically sealed to eliminate external contamination and usually use contact materials that doesn't need a wiping action to maintain conductivity. See Part 1 of this article for info on the materials used.
As the contact surfaces rub against each other, there will always be a small amount of wear, and because oxides are harder than the base material, minute particles of oxide may act as an abrasive and increase contact wear. When a relay is designed to use sliding contacts, this has been accounted for when the relay is manufactured, but if the relay is used in an area where there is significant vibration the wear may be accelerated. This is a real phenomenon, but is rarely the cause of contact failure unless the relay is operated dry for millions of cycles. If this is the case, then a semiconductor switch should be used instead.
One thing you must do to ensure minimum contact wear with DC relays is to ensure that the ripple voltage on the DC supply is not so great as to cause any buzzing or armature movement. Using an unfiltered or poorly filtered DC supply will cause mechanical movement of the armature and contacts, and this will accelerate mechanical wear. The P-P ripple voltage should typically be no more than 10% of the DC value (e.g. 1.2V peak-to-peak ripple on a 12V supply). Less is better, but usually isn't absolutely necessary.
The major problem with all electro-mechanical relays (EMRs) is contact arcing. However, well before the arc is created, there is the small issue of contacts melting. Not the entire contact of course, but perhaps only a few molecules. This effect happens as the contacts close (make) and open (break). When we examine even the smoothest surface under a powerful microscope, it's quite obvious that it's not really smooth at all.
So while the contacts of a new relay might look perfectly smooth, if examined with high magnification you find that this isn't the case. This general unevenness is called 'asperity' and it exists even in surfaces that appear to be mirror-smooth. It is inevitable that there will be high and low points at the atomic or molecular level, and as the relay is used these will move around as the contact material melts and is transferred from one contact to the other. That's not a misprint or facetious comment - it really does happen. Mostly it's at the molecular level, and it even happens when the relay is switching a small current. However, a relay used to switch 1V RMS signal levels at perhaps a milliamp or so will never arc, and there's not enough power to melt anything.
Currents of well under 1A can cause a sufficiently small contact point to melt. Consider that you can get fuses rated at less than 50mA, so it's quite apparent that if the conductor is thin enough it can me made to melt at surprisingly low currents. Of course the mass of the contact itself acts as a heatsink, so don't expect your contacts to be destroyed straight away - it may take well over 100,000 operations before you can even see any pitting. Metal migration and/or evaporation at the atomic or molecular level may only move a few molecules each time, and if the polarity is random (with AC supply and load) then the migration evens out - any material lost with one polarity is regained when the polarity reverses.
The temperature of parts of relay contacts at the moment of connection or disconnection can easily reach over 4,500°C, just at the critical point where all the current is concentrated in a very small region of the total surface. That this will happen is a certainty because of the microscopic peaks and troughs across the surface. There will inevitably be peaks that make the initial or final contact, and because they are so small the current density is extremely high. The contact material will melt and may be literally blasted away from the contact point because of the very high temperatures reached. Surrounding air becomes superheated, it ionises, and it's the ions of air and metal that eventually (well, after a few microseconds or so) create the arc.
The melting processes described are very short-lived, and may only exist for nano or micro seconds. In general, there will be some degree of contact melting even if your application never produces a visible arc. At relatively low voltages and currents you can expect some of the contact material to melt each time the contacts open or close. This means there will be a small quantity of material transferred between the contacts.
| Material | Conductivity | Melt Voltage | Arc Voltage | Arc Current |
| Copper | 100 % | 0.43 | 13 | 0.43 |
| Gold | 77 % | 0.43 | 15 | 0.38 |
| Nickel | 25 % | 0.65 | 14 | 0.5 |
| Palladium | 16 % | 0.57 | 15 | 0.5 |
| Fine Silver | 105 % | 0.37 | 12 | 0.4 |
| Tungsten | 31 % | 0.75 | 15 | 1.0 |
Note: Copper is the reference material in the above table. Other materials are shown relative to the conductivity of copper.
Melted contact material will tend to collect on the cathode (negative) contact, and there will often be material loss due to the melted contact material boiling and/or burning which disperses the molten material. While these effects are at the molecular level, over tens of thousands of operations there will always be some visible damage. If the contacts are under-specified the relay will fail prematurely.
In the table, the 'melt voltage' refers to the voltage that exists between each of the contact surfaces, assuming that there is a molecular bridge (a pair of high spots for example) between the two. If the voltage across the bridge exceeds the figure shown, the material will melt. The size of the bridge is immaterial, but in most cases it will be microscopically small. Arc voltage and current are discussed in the next section.
If you thought some of the stuff above was a bit scary, consider that everything changes for the worst when the current is several amps, and that's when we must find ways to minimise the arc. An electric arc can reach temperatures of over 19,000°C, and is no different from the arc welding process, where molten material is transported from the welding rod to the surface to be welded. DC is the worst, because the current is always in the same direction, so material will typically migrate from the cathode to the anode, carrying atomic or molecular particles of material with it. With AC (and assuming random switching), the polarities of the contact electrodes will change, so some material migrates first one way, then the other. In all cases where an arc is created, there will be some material loss due to splattering, and not all molecules from one contact are collected by the other. When there is material transfer via AC, the vaporised metal will tend to migrate from the hotter electrode to the colder one.
An arc may be developed as the contacts open or close, and this depends greatly on the contact surface and the nature of the load. If the arc is sustained, the contacts will be destroyed. Sustained arcs can normally only be created as the contacts open, because the arc is automatically extinguished once the contacts are touching each other. However, if there's so much contact damage that the contact surfaces touch briefly only during the contact bounce period, then an arc may well develop between the contacts. The gap might only be a few micrometres initially, but if the arc is maintained it won't take long before the contacts are completely destroyed.
Different metals have differing voltages and current that will allow an arc to form, and these are shown in Table 2.1. If the voltage and current are below the minimum, no arc will be created. However, if either the voltage or the current is above the arc rating for the contact material used, there will be an arc. A small amount of arcing is sometimes needed with contact materials to remove oxides (or sulfides in the case of silver), but all arcs are destructive and must be stopped as quickly as possible.
Provided the voltage and current are below the figures shown in Table 2.1, no arc can usually be created. If either voltage or current exceeds the arc threshold for the contact material in use, then there will be an arc. The voltage and/or current don't have to be steady state, and momentary transients can initiate the arc. Once the voltage and current fall below the values given the arc will normally extinguish, provided the gap between the contacts is wide enough.
The relay contacts are designed to separate enough to ensure that the arc will be extended until its impedance is high enough that the arc current can no longer be maintained. Because of the differences between AC and DC, a relay rated for 10A at 250V will be heavily derated if it is used with DC. It's common to see a 250V AC relay derated to 30V DC for its rated current (you can see the ratings clearly on the Zettler relay in the photo below - centre-top in the picture). Should you choose to ignore the maximum voltage (especially with DC) you can expect the relay to fail. This can happen the very first time it's used, and failure caused by a serious arc will be total and permanent. There are ways that the arc can be suppressed though, and that is the primary purpose of this second part of the relays articles.
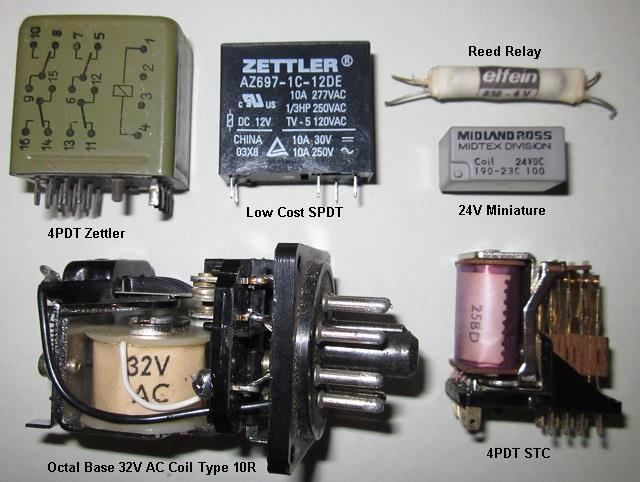
The selection of relays shown is the same as that in Part 1, and is shown again here for reference. Most of the tests I conducted used the octal based relay, for the simple reason that the cover is easily removed. There's no point trying to observe an arc if you can't see through or remove the cover. In some ways this is an 'unfair' test, because the relay has very solid contacts and wide separation, but the trends are still very obvious and it's easy to see if a technique makes a difference or not.
Over the years, several different techniques have been developed to quench contact arcing, or in some cases it can be possible to prevent an arc from starting at all. The latter is the ideal case, and a well engineered snubbing circuit can be surprisingly effective. These techniques apply equally to switches, because they also have contacts and are often operated at voltages that exceed their ratings. Big, solid toggle switches can handle a fair amount of abuse as can equally big relays. The idea here though is to do what we can to prevent the abuse, and allow the use of a smaller and cheaper relay (or switch). Alternately, if the switch or relay is kept the same, we can expect it to last for the life of the equipment.
The methods used depend on the load and the supply. Some arc suppression techniques are only applicable to DC, and others can be used with AC or DC. AC is always easier because the current passes through zero either 100 or 120 times a second depending on the mains frequency. Higher frequencies (400Hz for example, commonly used in aircraft electrical systems) may create additional problems, but most aircraft parts are specialty items and will not be covered here.
Arc suppression is often needed to reduce RF interference, especially if the equipment will be used anywhere near AM radios or where EMI can't be tolerated because it will cause other equipment to malfunction. The earliest radio transmitters used were based on a spark gap - a fancy name for contacts supporting an arc. The RF noise created is wide band, and can travel a surprising distance. Early radio (or wireless as it was known at the time) transmissions across the Atlantic Ocean used spark-gap transmitters.
You will often see a small arc generated as the contacts close. This seemingly odd behaviour is usually the result of contact bounce. Relay and switch contacts almost never make perfect contact when operated, even though it appears so to the naked eye. An oscilloscope will show clearly that the contacts make, break and make again several times when a relay or switch is operated. The contacts and supporting arms have mass and resilience, and when the two contact faces are brought together they bounce several times before settling with the contacts touching each other as they should. When (not if) this happens, an arc is created each time the contacts separate, and because the distances involved are usually very small, it's easy for the arc to be maintained for the few microseconds when the contacts have separated.
Lest you think that I'm exaggerating and that it can't possibly be as bad as I claim, cast your eyes on the following photo. What you see in the photo is all that remained of the upper contact set after a sustained arc. The relay shown is a heavy-duty industrial type, and internally it's almost identical to one that I used for some testing (but not to destruction).

Sometimes, the easiest way to get a wider contact separation and reduced chance of developing an arc is to use two or more sets of contacts in series. By increasing the effective total gap between the contacts, you obtain a much greater voltage rating without affecting the current. Even then, you need to employ methods to prevent the arc from forming - seeing a relay with a continuous arc at 5A or more is a scary thing to behold, and you know immediately that if it's not stopped fast you'll have an ex-relay on your workbench. If it happens, the contact arms may be heated to such a high temperature that they lose their elasticity ('spring') and will not provide proper contact pressure. It only takes a few seconds!
Using a magnet to 'pull' the arc away from the contacts can work very well, but it's not a common scheme. The magnet needs to be very close to the contacts and/ or very powerful. Neodymium magnets are available that will do an admirable job, but the magnet's polarity and the arc polarity determine effectiveness. This is something that requires trial-and-error testing, and of course it's essential that you can see the arc and whether the magnetic field is effective. Magnetic arc-quench are sometimes referred to as using 'blow-out' magnets. With the right combination of magnets and contacts, a more-or-less conventional relay can be operated at up to 80V DC at 20A [ 9 ].
The magnet(s) must be in exactly the right position for the relay in use, and must not polarise the relay's magnetic circuit, as that could easily prevent the relay from activating and de-activating as expected. Because everything depends on the relay's construction, the magnetic strength and positioning of the magnet, no further details will be presented here. Because it's so uncommon, most people will never have seen it done, and further discussion would not be useful. Feel free to experiment, but be aware of the pitfalls.
There also the (not insignificant) problem of mounting the magnet onto the relay body. The magnet must be firmly attached so that it can't move or fall off, and in the exact position determined by testing. This isn't trivial, because relay cases aren't always made with adhesive friendly materials, and Neodymium magnets have an external plating that can degrade with time. If the magnet were to fall off, you have a loose magnet inside your equipment and a protection relay that won't work. I expect that few readers will find either option to be desirable.
Commercial (permanent magnet) arc-quenching relays exist, primarily to cater to the electric vehicle market. The polarity is critical for correct operation, so using a magnet is unpredictable if used for a speaker protection circuit because the fault can be positive or negative DC, and the magnet's polarity and position cannot be optimised for both. Electromagnet arc quenching relays also exist, and they use the fault current to generate a magnetic field that's correct for the polarity of the fault current. These are primarily industrial products, and are not suited to most hobbyist applications.
A simple, effective and very common technique is to use a resistor and capacitor in series across the contacts. This arrangement is commonly referred to as a 'snubber' circuit, and they are used extensively in all sorts of different designs. The capacitor absorbs some of the energy that would otherwise be dissipated in the arc, and if we reduce the available energy we can expect the arc to be extinguished faster than it would without the snubber circuit. Note that adding a snubber as shown simply reduces the arc, and assumes that the relay is being used at no more than its rated current. Adding a snubber helps to minimise EMI (electromagnetic interference) created by the arc, but does not mean that the relay's limits can be exceeded!
There are some 'rules of thumb' that are applied to snubbers used across contacts, and these give the designer a good place to start. The following fall into that category - this isn't meant to be the only range of values that can be used, but you have to start somewhere ...
R1 - 0.5 to 1Ω per contact volt
C1 - 500nF to 1 µF per contact amp
For example, if you wanted to switch 48V DC at 10A, R1 could be 24Ω, and C1 would be around 20µF. If AC is being switched, the series impedance of R1 + C1 must be large compared to load impedance, or current will be delivered to the load even when the contacts are open. Because AC is less troublesome than DC, the capacitance value can be reduced considerably, and I'd suggest that C1 would only need to be around 1µF at the most. This limits the current to about 15mA when the contacts are open with a 48V 50Hz supply. This is only an example, and your load needs to be tested carefully to ensure that the residual current doesn't create more problems.
Although it may not seem very likely, this basic snubber is surprisingly effective. I tested a 40V DC load at 4A using a 10Ω resistor and 1µF capacitor, and the only evidence of an arc occurred when the contacts closed. This was due to contact bounce. Without the snubber, there was a very noticeable arc as the contacts opened, exactly as expected. In case you were wondering, the resistor is there to keep the current to a manageable level when the contacts close, and it should not be omitted - even though the arc quenching action is far better with no resistance.
While the contacts are open, C1 will charge to the full supply voltage. The capacitor will usually be a metallised film type, and these usually have a very low ESR. When the contact close, the cap is shorted, and the peak current can be extremely high. This can lead to severe contact erosion due to melting as discussed above, and the worst-case scenario is that the contacts weld closed. This will tend to happen anyway, and normally the return spring is strong enough to break the weld when the relay is de-energised. If the current is high enough, at some point in the future the weld will become permanent or there will be so much contact erosion that the relay fails.
R1 in the circuit shown limits the peak current to 2A, but it can be reduced further to get an improved arc quench as the contacts open. When the contacts first open, the ideal is to use only the capacitor, as it will keep the voltage across the contacts below the arc voltage for the few microseconds it takes for the gap to be wide enough to prevent any arc from starting. As discussed, this will create a very high peak current when the contacts close, so I suggest that the following circuit be used. Note that it can only be used with DC.
Adding D1 means that the capacitor is almost directly across the contacts, so can absorb close to the total energy that would otherwise create an arc. D1 must have a 1ms surge current rating that's at least the same as the load current, but preferably a lot more. The contact current as the contacts close is limited by R1 (and the load of course), so R1 can be a much higher value than it can be without the diode. For normal applications, it should be around 10 times the value that you would have used with no diode, so around 240Ω is perfectly alright. The enhanced version should be able to prevent arcing almost completely if the capacitor is sized appropriately. Larger capacitance means better arc quenching capability, but the diode's peak current is extended so a larger diode might be needed.
This circuit is particularly well suited for use across the DC standby switch as used in many guitar amplifiers. These often have no protection circuit at all, and the only reason that a sustained arc isn't created when the switch is opened is because the current is comparatively low, usually less than 100mA. Adding the Figure 4.2 circuit will completely eliminate the arc if the cap is sized properly, and it should be rated at no less than 1kV for most valve amplifiers.
In either circuit, the selection of the capacitor is critical. The cap used must be capable of withstanding the peak current, and naturally requires a voltage rating that's well above the source voltage. X-Class mains caps are a good choice for most applications, because they have a high voltage rating and are designed to handle the spikes and noise that normally rides on the mains. In any event, the capacitor you use needs a high surge current rating, and this needs to be verified from the specifications. If you use any old cap that comes to hand you are likely to face bitter disappointment when the cap eventually fails and the relay contacts burn up or the cap shorts out. The same applies if you skimp on the diode.
The snubber circuit (whether 'traditional' or 'enhanced') needs to be as close to the relay contacts as possible. Long leads mean inductance, and that can easily partly undo the benefits of the circuit. Leads should ideally be no more than ~25mm in total length to keep stray inductance low.
I mentioned earlier that most tests were done using the octal based relay seen in Figure 3.1. It's noteworthy that at a current of 5A DC and an unloaded voltage of 80V, even that relay could sustain an arc across the contacts when fully open. The relay has a contact spacing of about 0.8mm, and while that doesn't sound like much it's significantly greater than most of the smaller relays used in electronics projects. Another I measured has contact clearance of only 0.3mm. Using the enhanced snubber, the arc was negligible as the contacts opened - most of the time there was no arc at all, but occasionally a small flash was visible. I was only using a 1µF capacitor for initial tests, and increasing that to 5µF eliminated the arc almost completely. Running the contacts in series (see Series Contacts below), it was possible to switch 5A at an unloaded voltage of 80V with no snubber at all! Well, until it decided to develop a continuous arc when the voltage was increased only slightly!
If the relay was expected to handle this voltage and current in a real circuit, I would use at least 10µF of capacitance and a high current diode (at least 3A). Even then, before deciding that it would do the job, I would insist on testing the circuit for at least 10,000 operations, and use a data logger to record each break to ensure that there was no arc at all for the full 10,000 operations. I would not be game to use it unattended without this test, and certainly wouldn't suggest it as a project or use it in a commercial design until I was absolutely sure that it was up to the task.
In some cases, the snubber is installed in parallel with the load. The capacitor has pretty much the same function in this case, as it holds the load voltage up so that when the contacts open the voltage across them is momentarily only a few volts. Capacitor and resistor selection are the same as before, and the resistor is still used to limit the peak current into the capacitor when the contacts close. With no resistor, the current is limited only by the circuit impedance and the cap's ESR, so a very high peak current will flow.
Snubbers can be used with resistive or inductive loads, and the standard version works with AC and DC. However, in no event should you assume that just because you've made the calculations given here or elsewhere that all will be well. Every case needs to be tested thoroughly, because it only takes one instance where the arc decides to become continuous and the relay is ruined, and quite possibly other circuitry as well. You can often get away with almost anything with AC, but any DC application poses special problems and requires equally special attention.
If it's at all possible, the AC source for the DC should be switched. If the DC is obtained from a bridge rectifier and filter capacitor, switching the AC to the rectifier is preferable to switching the DC, but of course this isn't always convenient or applicable. There's much to be gained by using a MOSFET relay or a discrete MOSFET switch for DC, but great care is still needed so that peak current is well within the MOSFET ratings. Also, beware of a failure mode with MOSFETs that's remarkably close to second breakdown in bipolar transistors.
When you have a DC supply and the load is inductive, even seemingly benign voltages and currents can cause serious arcing. Just as relay coils have back-EMF, so do other inductive loads. These include other (generally larger) relays, motors, solenoids of all kinds, magnetic clutches, etc. Adding a diode in parallel with the load will eliminate the back-EMF just as it does with a relay coil, and again will increase the release time of the connected relay, solenoid or clutch. Whether this is a problem or not depends on the application.
Use of a diode in parallel with the load doesn't mean that nothing else needs to be done, especially if the load draws a high current or needs high voltage to operate. The extra diode only suppresses the back-EMF from the load, but it does nothing to protect the contacts against a DC arc. In such cases you'll probably need to use a snubber and diode as shown in Figure 4.3
While you might think the above is overkill, something along these lines will often be necessary if the load operates from a high voltage. Any DC voltage above 30V or so means that specialised relays will be needed, but even a relay rated for 30V DC may be able to be operated at higher voltages if the proper precautions are taken. Manufacturer's data generally assumes that you will use the relay 'as bought', without any corrective measures. If you are careful, run tests and apply proper arc quenching circuitry, you may be able to extend the rated voltage. By how much depends on the relay itself, and some will have a safety margin built in, others not. You will never know until it's tested, and in some cases that will mean a very rigorously designed test that punishes the contacts right to the point of failure.
Ok, the average hobbyist isn't going to design a test jig and run tests at that level, but if you happened to be making aerospace products there would be no choice. The main point here is that testing is essential, at least at the basic level. Something that seems as though it should work fine may or may not actually perform as expected when subjected to real life conditions.
Note: Most AC loads don't need anything to clamp the transient, as you'll find in most equipment that uses AC relays, solenoids or motors. The most common way to eliminate clicks and pops that are carried by the mains wiring are suppressed with a simple snubber, and then only if the switching noise is obtrusive and/or would cause the equipment to fail conducted or radiated emissions tests (for compliance with local regulations). It's uncommon to see any additional protection, so unless you really need to eliminate any back-EMF, you don't need to add anything to the circuit.
For AC loads and some DC loads where use of a diode will slow down the release time of a solenoid valve or other actuator, a TVS or a MOV can be used. These will limit the transient to a preset maximum. TVS diodes are available in a wide range of voltages, and come in two forms - unidirectional and bidirectional. They are similar to zener diodes, but are capable of much higher instantaneous peak current - a typical 30V TVS might be capable of clamping over 500A, an instantaneous power of 15kW or more. The duration of the peak current must be very brief at the maximum ratings of course, and will typically be less than 1ms.
With any TVS, you also need to be careful of the junction capacitance. With low voltage devices, this can be over 5nF, and the capacitance and load inductance form a parallel tuned circuit. Again, it depends on the application whether this will cause a problem or not. AC applications must use a bidirectional TVS diode, and unidirectional devices are suitable for use with DC circuits.
MOVs are another way to minimise high voltage transients, but their breakdown voltage is not well defined so your circuit needs to use contacts with sufficient clearance to ensure that the worst case breakdown voltage is still well within limits. Be aware that MOVs will slowly fail with repeated over-voltage conditions. The degradation either means that the protection is lost, or they may suffer from thermal runaway. This will cause the MOV to explode or catch on fire. Some are equipped with an internal thermal fuse.
You would use one or the other - a TVS or a MOV, depending on the circuit, the likely voltage transients and the nature of the load itself. For DC applications, a unidirectional TVS diode can be used, but not if it will cause a problem for the load. The most common will be delayed reaction due to the current that is generated by the back-EMF. TVS diodes are a better choice most of the time, as they don't suffer degradation over time with repeated over-voltage 'events'. Some MOVs are designed for high reliability, provided the maximum impulse current is reduced from the allowable maximum. For example, a 300A MOV may last for 100 full-current events (at 20μs), 1,000 events at 100A, but that's extended to 1,000,000 times if the impulse current is only 50A (from Panasonic ERZE10A series datasheet). If you intend using an MOV, make sure that you fully understand the implications and potential failure modes.
The back-EMF from AC motors is usually not great, and with transformers (with an output load) it's generally close to zero. The load absorbs most of the back-EMF, other than that caused by leakage inductance. A load with an inductance of 1 Henry and a series resistance of 5Ω will draw 0.73A at 230V. If the current is interrupted at the peak of the AC waveform, you could get a peak voltage of up to 1.6kV (assuming exceptionally low losses). The duration will be low - probably less than 100μs. The energy is also low - the available current may only be a few milliamps.
If you do need to clamp this voltage (which is sporadic with random switching), it's up to you to consult datasheets and decide what to use. Some people may claim that use of a MOV is dangerous, but that's only true if it's underrated. It's a fact of life that components can (and do) fail, so sensible precautions must always be taken that a failure doesn't cause a risk of fire or injury. A MOV with an internal thermal fuse is a wise precaution.
An easy way to get a higher voltage rating from relays is to use two sets of contacts in series. The current rating isn't affected, but the effective open contact gap is doubled so breaking an arc becomes less challenging. In this instance though, the term 'high voltage' does not imply kilovolts, but AC voltages below 500V or DC voltages below 70V or so. True high voltage relays are another matter altogether, and may have contacts within a vacuum or a pressurised inert gas.
Using conventional relays at higher than their design voltages is possible, simply by connecting contacts in series. You need to be certain that the dielectric strength of the contact insulation is up to the task (the datasheets may help there), and in general you can expect little or no help from relay manufacturers because you're using the product in a way that wasn't intended. An example of this arrangement is shown below.
The way the contacts are arranged need not be exactly as seen above, and in some cases will be dependent on the relay contact pinouts and printed circuit board layout. The end result must be tested though, because there may be relay base pin or PCB spacings that aren't capable of withstanding the full voltage without flashover.
Using this scheme, a common double-pole relay rated for 30V at 10A DC can now be used with a 60V DC supply. The snubber circuit is still a very good idea and it should not be omitted. If used with AC, in theory it would be capable of switching 500V, but the insulation and/or pin spacings may not be good enough to allow this. The maximum voltage as detailed in the datasheet really is the maximum and should never be exceeded.
The above graph was adapted from a Schrack RT2 PCB mounting relay datasheet. It shows quite clearly that at maximum rated current of 8A, the DC voltage must not exceed 32V for a single pair of contacts, or 64V with two sets of contacts in series. As the load current is reduced you can apply more voltage, but the absolute maximum DC voltage is limited to 300V due to the relay base pin spacings (only 2.5mm between pin centres for the contact pins). As noted in the graph itself, these voltages apply for a resistive load. It's not stated, so assume that the voltages and currents shown apply when there is no snubber circuit in parallel with the contacts. However, even with a snubber, it's better not to exceed the voltages and currents suggested by the maker.
Never use a pair of DPDT contacts on the same relay to reverse the polarity to a motor or other load. It may be economical, but it's a disaster waiting to happen. The contact clearances are small in most relays, and applying the full voltage across the NO and NC contacts is asking for trouble. Should an arc develop, it will be directly in parallel with the supply, and will have very low series resistance (as shown in Figure 5.1). The diagram below shows the right and wrong way to do it.
With most motor applications you need to be able to turn off the motor anyway, so using two relays isn't a major penalty. The other problem with using a single relay is that it can be switched from forward to reverse with no intervening stop period, so the motor will draw extremely high current and may be damaged. The circuit shown as 'Do NOT Do This !' is positively dangerous, to the power supply, the motor and the relay.
The relays are shown de-energised in both cases. To switch the motor properly, use two relays ('Do This Instead' in the drawing). The circuit is not too different from a transistor 'H-bridge', and as with the transistor version you must ensure that both relays can never be operated at the same time, as that will short circuit the power supply. If you use relays with three sets of contacts it is possible to devise a lock-out that will prevent both relays from being energised simultaneously. The lock-out circuit can also be done electronically, in the circuitry that drives the relay coils.
I've shown both relays as DPDT (2-Form-C), but you can use 2-Form-A (double pole, normally open contacts only), and you only need to be concerned with the general principles of arc suppression. There will only ever be minor arcing across the contacts with low voltages, but for higher voltages you will need to use snubbers for arc suppression. In the second circuit there are two sets of contacts in series, so 30V DC relays can withstand 60V DC.
When Relay 1 is operated, the positive supply is connected to the left side of the motor, and negative on the right. Relay 2 reverses the polarity. When both relays are at rest (de-energised), the motor has no power. This isn't the only way it can be done of course, but the general principles will be the same.
Sometimes, it's required that the motor should stop as quickly as possible. The easiest way to achieve that is to short circuit the motor when it's turned off. Figure 5.2 shows how this can be done. When both relays are de-energised or energised, the motor is shorted to either the +ve or -ve supply. This removes any constraint about having both relays on at the same time, but at the same time, the motor will always be shorted when it's not running. For some applications this is a good thing, but not always.
With both relays de-energised, the motor windings are both connected to the +ve supply. If Relay 1 is operated, current flows through the NC contacts of Relay 2, through the motor, and then to GND (negative supply) via the NO contacts of Relay 1. The process is reversed when Relay 2 is energised.
Choose the method that provides the functionality you need, either with or without the short across the motor when it isn't being used. Be aware that shorting a running motor can generate some serious mechanical stress, and it's not always the best option. You'll need to test your motor to ensure that the stress of a short when it's at maximum speed doesn't create problems.
You must be absolutely certain that the arc drawn from the contacts opening under load cannot be sustained. If that happens, the relays and power supply will be destroyed, there will be a great deal of smoke, and there won't be much left after the DC has done its worst. It's a nice, simple way to reverse a motor, but it has dangers that you must understand. Relay selection is critical if you use this method.
Many loads show significant inrush current, and that creates considerable stress on the contacts when they close. Some examples are listed below, but there are many variations. Tungsten lamps are being phased out all over the world, but they will still be used for many industrial processes and will never go away completely. Toroidal transformers are much worse than transformers with E-I laminations, and some electronic loads include active inrush current limiters but most don't. Stray capacitance on long wiring runs might seem an unlikely source of inrush current, but it can be a real problem - especially since the impedance is very low. I suggest that you read the article Inrush Current Mitigation for more info.
Examples of loads that produce significant inrush current transients at contact closure are as follows ...
1 - Tungsten lamps, where cold resistance is 7% to 10% of their normal operating resistance
2 - Transformers and ballasts, where inrush may be 5 to 20 times their normal operating current
3 - Electronic loads, typically power supplies for appliances, computers, lighting, etc.
4 - Large AC solenoids and most motors
5 - Capacitors placed across contacts or capacitive loads with no (or inadequate) series current limiting resistance
6 - Stray capacitance in long cable runs
There are few choices for the hobbyist or even industrial designers - use relays that have heavy duty contacts, and contacts with good thermal and electrical conductivity and welding inhibitors. This will typically mean a silver + cadmium oxide alloy for the contacts, or perhaps silver tin oxide. For most power switching functions, 10A, 250V AC relays are common and very reasonably priced, and especially for hobbyist applications few circuits need more. For example, saving a few cents to get a 5A relay for a 4A circuit would just be silly. Industrial systems are very different of course, especially since some equipment may subject the relays to a torturous on/ off cycle.
For large toroidal transformers (anything above 300VA), a 'soft start' circuit such as Project 39 is recommended. That uses relays, and the recommended relays are 10A, 250V types. These were selected because I know they will take the abuse, they are readily available and inexpensive. In general, a soft start facility is highly recommended for use with transformers, and if possible the peak inrush current should not be greater than the relay's maximum current rating. This ensures a long contact life with normal usage.
An inrush limiter can also be used with tungsten filament lamps, and this will not only reduce the very large current surge, but prolongs the life of the lamps because there's reduced thermal and magnetic shock. Lamps can also benefit if driven by a solid state relay with zero-crossing switching. This isn't as good as a properly designed inrush limiter, but it does reduce the starting current quite significantly for low wattage lamps. Very high power lamp filaments have considerable thermal inertia so zero-voltage switching may not be quite so successful.
Inrush 'events' aren't limited to inductive, tungsten filament or electronic loads though. Many installed fluorescent lighting systems have power factor correction (PFC) capacitors wired in parallel with each luminaire, and these present almost a dead short circuit at the moment of power-on. The initial surge current can be astonishingly high, and is only limited by the impedance of the wiring. These circuits cause great stress on any switch or relay that's used to control them, but there are few commercial soft-start units available. This becomes an extraordinarily complex problem for large installations, and while it's very interesting, it's not possible to try to cover it here. PFC capacitors are also used with motors and other inductive loads, and they cause problems there too.
Most inductive loads have an iron core, and the high inrush current is caused by core saturation when power is applied. This applies to all AC powered inductive loads - DC is different and will be looked at separately. A very few AC inductive loads may not use an iron core at all, so saturation is not a problem. However, I can't think of any off hand, so there's not much point discussing something that is unlikely to be found in any real application.
While it might not sound like it could possibly be true, the optimum part of the AC waveform to switch any inductive load is at the peak of the AC waveform. One might feel that zero volts would be ideal, but one would be very wrong. This is simply because of the way an inductor works. When presented with an initial high voltage, the current cannot increase instantly, but increases at a rate determined by the inductance and the circuit resistance/ impedance. If we have a circuit resistance of 10Ω and we apply 325V DC to a 10H inductor, the initial current is zero, and after 10ms the current will only have risen to about 313mA. It will take over 2.5 seconds before the current has risen to 30A, and the maximum current is limited by the resistance. However, this assumes an inductor that can never saturate, and these are few and far between (air-cored inductors are free from saturation).
A transformer or other AC inductive load may well have an inductance of 10H, and the steady state magnetising current will typically be less than 50mA - often much less (especially for toroidal transformers). Before you continue with this discussion, I strongly recommend that you read the article Inrush Current Mitigation. This article includes oscilloscope traces and other material that fully explains the phenomenon and how to deal with it.
If the mains to any inductive load is switched at the peak of the AC waveform, inrush current is limited to a comparatively safe value. This can be combined with a soft-start circuit using resistors or thermistors, combined with a relay to short them out after the inrush event has ended. Many designs using thermistors omit this part, so after a momentary power outage the peak current is limited only by wiring and circuit resistance, because the thermistors are still hot and at their minimum resistance. This can create havoc, with tripped circuit breakers (for example) causing a potentially dangerous situation to arise.
While switching at the peak of the AC waveform is highly desirable to minimise inrush current, it also creates a very fast risetime pulse on the mains that may create problems with other equipment. It's also very difficult to do with any accuracy with EMRs, because each different type will have a different pull-in time, and it changes with age and may even be affected by temperature. Once EMRs are synchronised with the mains, we also get the problem of unidirectional contact material transfer - just as we do with DC. If this is attempted, the microcontroller needs to be programmed to ensure that the polarity of the mains can be switched, so the relay will operate for 50% of the time with positive half-cycles, and 50% of the time with negative half-cycles. Why a microcontroller? It's extremely difficult to even attempt synchronised switching using anything else.
The only sane way to attempt any form of switching that's synchronised to the mains waveform is to use a solid state relay (SSR). Despite their potential problems (especially with electronic loads), they can be triggered very accurately at the time you require, and for difficult loads you can simply include an electromechanical relay in parallel. This isn't as silly as it might sound at first. The SSR provides accurate control of the point where the AC waveform is switched, and it only needs to be in circuit for a couple of milliseconds.
The general idea is shown above. To trigger the circuit on, both inputs will go high together. The SSR will trigger immediately, and a few milliseconds later the contacts will close. To turn off, the EMR is switched off first, and enough time has to elapse to ensure the contacts are fully open. Then the drive to the SSR can be removed, and it will turn off by itself as the current passes through zero. You might wonder why a snubber has been included. You may not need it, but if there's significant line inductance between the relay and load, there is a possibility that an inductive 'kick' (back-EMF) may re-trigger the SSR. The snubber slows down fast risetime pulses and prevents over-voltage from back-EMF from the load or wiring.
Even if used for high current loads the SSR should run cool, because it only ever has to handle half a cycle of AC. The thermal inertia of the package will be sufficient to prevent overheating provided the switching duty cycle is fairly low. For rapid switching the SSR may need a heatsink, but it will be much smaller than would be the case without the relay.
When the EMR takes over, the many and 'interesting' problems that can occur with an SSR and electronic load are eliminated. When the load is switched off, the EMR should always release first so the load current is then broken by the SSR. 20ms (16.66ms for 60Hz) is plenty of time for this to happen smoothly and cleanly - every time. I built an inrush current test unit that has just that - an SSR is used to make and break the circuit, and the electromechanical relay carries the current after it's triggered.
Inductive loads not only have the inrush problem, but if the circuit is broken while the load is drawing current, you get the back-EMF problems discussed earlier as well. The parallel relay + SSR solution deals with that too, because the SSR will always cease conduction as the current passes through zero. The SSR doesn't arc and although the normal relay has the full voltage across its contacts, there won't be an arc because they are fully open by the time the SSR opens the circuit.
The benefits of the hybrid solution have not been ignored, and they are used in industrial applications. Several manufacturers make hybrid SSR/ EMR combinations with the required logic built-in. One major benefit quoted is the dissipation of an SSR by itself, which will be around 1W for each amp of load current. A conventional relay has extremely low losses by comparison, so this allows very high power relays to be made without the need for a heatsink, and without the contact erosion that comes with all EMRs switching appreciable current and voltage.
It's very important to understand that SSRs using TRIACs or SCRs cannot be used with DC. Both of these devices require the current to fall to zero before they will switch off, and that doesn't happen with DC. There is a device called a 'gate turnoff' SCR (GTO-SCR or GTO thyristor), but they are usually quite difficult to use and are mainly employed in large industrial controllers. They are commonly used in high power inverters and variable speed motor drives, and will not be covered here because they are not used as relay substitutes.
It's also important to note that SSRs do not provide the complete circuit isolation that you get with an EMR. There will always be some leakage current, because the thyristors are semiconductor devices and do not have infinite impedance when turned off. The snubber circuit (if used) makes leakage worse, because the capacitor will pass an AC current proportional to its value. The leakage current must be considered in an application as it may cause some loads to malfunction.
DC inductive loads include relay coils, solenoid valves, magnetic clutches or brakes, and motors. A diode in parallel with the load will eliminate the back-EMF, but as mentioned earlier this will slow down the release of solenoids of all kinds (including relays). The remedies are exactly the same as those discussed for relays in Part 1 of this article, and may include just a diode where release time is not critical, or diode plus a resistor or zener if a small delay can be tolerated. Where the minimum possible delay is needed, you'll need to use a bidirectional TVS or perhaps a MOV, and the switching device (or SSR) will have to be rated for the worst case voltage peak when power is removed.
As with any DC load, contact arcing is the primary concern. At voltages below 30V and currents less than 10A, there are many low cost relays that will do the job just fine, but higher voltages will create problems. Snubbing circuits are a start, but you may also need to use series contacts to ensure that the arc can be extinguished with 100% reliability. If at all possible, use a MOSFET, IGBT or transistor with a high enough voltage rating to withstand any back-EMF (after clamping it with a TVS or MOV of course). With no clamp, expect peak voltages of 500V to 2kV, especially with circuits with high inductance.
In most areas, fully capacitive loads are very uncommon, but as mentioned above there are countless places where capacitors are used in parallel with inductive loads to improve the power factor of the circuit. These create problems because of very high inrush current, and it may be necessary to include series inductors to reduce the inrush to manageable levels.
While not capacitive, one very common load is switchmode power supplies. These are not capacitive loads, because they rectify the mains and smooth the DC output with a capacitor. The filter cap does not reflect a capacitive load because the diodes in the bridge rectifier prevent the capacitance from influencing the incoming supply with any reactive component. They present a non-linear load only. This point seems to have been lost on many people (including electrical engineers who should know better), and is true whether you believe me or not.
Where the capacitance does cause serious problems is at the moment of switch-on. The cap is fully discharged, and acts like a short circuit for the first few microseconds. Inrush current is limited only by the series resistance of the circuit. Attempting to use any thyristor based SSR for these loads is a disaster, and there are some interesting oscilloscope captures in the Dimmers & LEDs article that show what can go wrong. Where this becomes interesting is when the thyristor controller is supposed to be fully on. No problem with resistive or even inductive loads, but it's very different with electronic loads. Because these are so common, their behaviour needs to be examined.
A typical electronic load is shown below, but the switchmode power supply is replaced by a resistor that draws the same power as would the supply itself. The problems are caused by the bridge rectifier and capacitor - not by the switchmode circuitry. A thyristor cannot remain turned on if the current through it is less than the holding current - this is a value specified in the datasheet. With an electronic load, no current can flow until the incoming voltage is higher than the voltage across the filter capacitor. Therefore, a TRIAC or SCR based SSR does nothing until the peak mains voltage is slightly higher than the cap voltage, even with continuous or pulsed gate current applied. When the SSR switches on, it does so with an extremely fast risetime. The only thing that limits the current peak is the mains wiring inductance and resistance, along with any (token) limiting circuits in the load.
The circuit for the electronic load is very common, and is used at mains voltage and low voltages after a transformer. Parasitic lead inductance has not been included, but there's a token limiting resistor in the load itself, sized to keep its dissipation below 5W. Once the circuit reaches 'steady state' conditions, the SSR cannot conduct until the incoming mains peak is slightly higher than the capacitor voltage, and it will switch off again once current stops. This will occur just after the AC waveform peak. Because the conduction period is so short, the peak current must be a great deal higher than normal. This type of load develops large peak current at the best of times - the SSR only makes it worse.
For the electronic load simulations, I used 230V AC at 50Hz, and the output power is 300W, dissipated by the load resistor. The peak current seen in the trace below is 84A, and remains above 42A for 50us. The RMS current is 5.3A - four times higher than it should be for a 300W load. This will never be immediately apparent unless you take careful current waveform measurements. This must be done with an oscilloscope, because few RMS meters can handle the very high peak-average ratio, and they will read low. The SSR needs to trigger just 500µs after the incoming AC equals the DC voltage across C1 for the current waveform below to be generated.
The red trace is the DC voltage, green is the mains input current and blue is the mains input voltage. With a switch or a conventional relay, the total load power isn't changed, but the peak current is limited to 10A and the RMS current is then 2.7A - a significant difference. This is the reason that thyristor based SSRs (SCRs or TRIACs) should never be used with this type of electronic load. The circuit and simulation have been exaggerated a little for clarity, because in reality there will be more resistance (largely from the mains power feed), and there will also be small inductors on the mains side of the rectifier to minimise interference. The peak current in a 'real' circuit driven this way will probably be less than half that measured here, but at 40A peaks that's still very stressful on the components. This is also a repetitive high current, so the SSR would need to be rated for the worst case peak current - continuously.
A hybrid relay is another matter. If designed to switch on at the mains zero crossing and immediately thereafter the load is taken up by an EMR there's no problem. Inrush current is minimised, there's no contact arc, and the load will switch off when there's no current. That's an ideal situation that can only be achieved with a hybrid SSR+EMR circuit. Electronic loads pose special problems, but if you haven't investigated them thoroughly (with bench tests to verify your theory) it's quite easy to miss the problems and you end up with equipment that fails (or doesn't work) for no apparent reason.
Just in case you were wondering, using an SSR with zero-voltage switching (for an electronic load) but without a parallel EMR may not work at all. By the time the incoming peak voltage is high enough to allow current to flow, the zero crossing detector circuit will have inhibited switching, so nothing will happen. A zero voltage switching SSR can only work if it's shorted out by relay contacts before the first half-cycle has completed.
Note that using zero-voltage switching for inductive loads (including transformers) results in the maximum possible inrush current, and must be avoided.
Hybrid relays were suggested above, and while you can certainly build your own, you can also buy them ready-made [ 7 ] (example only, others also exist). They are made by quite a few different companies, and are designed specifically to solve the problems of both SSRs and EMRs, as described above. Contact arcing is eliminated, so the EMR's life is not reduced by arc corrosion, and the heat problems of SSRs are eliminated by the bypass system. A heatsink isn't needed, because power is dissipated for only 10ms or so. However, there will probably be a limitation on the number of on/ off cycles in a given period.
These have their own page, as the possibilities are extensive. To see information on the different types, see Hybrid Relays using MOSFETs, TRIACs and SCRs. Because they are specialised (and expensive) you may be tempted to built your own, and provided you have the skills to build it (and verify every aspect of its function and safety) there's no reason not to do so.
Don't expect to be able to rush out and buy one easily, because they are considered as fairly specialised industrial devices, but they do exist. As described earlier in this article, the most common arrangement is a TRIAC to perform the actual switching, with an electromechanical relay in parallel to handle the load current. There is no longer any need for a heatsink for the SSR section, because it's only in-circuit for a very short time, and the EMR doesn't suffer from arcing because it's designed to open first. Once enough time has elapsed to ensure the contacts are open, the SSR is then turned off. This only takes a few milliseconds, so it doesn't create any issues with timing in most applications.
Another major advantage is that EMI (electromagnetic interference) is reduced to almost nothing, because there is no arc from the contacts. This may be more important than anything else in large data centres (as just one example), where EMI can create havoc with nearby computer systems. Most are designed for AC only, and while there's no reason that a MOSFET hybrid relay can't be produced (which would allow DC operation), I only found a couple of references when I searched.
Note carefully! There are two types of hybrid relay. One uses a reed switch to activate a TRIAC or back-to-back SCRs, and while this does qualify for the term 'hybrid', it's not what's discussed here. The only hybrid that truly deserves the title is a semiconductor switch with an electromagnetic relay in parallel, which provides the benefits outlined in this section. Reed relay 'hybrids' are (fairly) readily available, but do not provide any significant benefit for normal uses compared to opto-isolated SSRs. They are useful for products that need immunity from ionising radiation (where photo-diodes will conduct due to radiation bombardment, e.g. X-rays, Gamma rays, etc.).
There isn't a great deal of information available on the internal circuitry of any hybrid relays (other than the ESP article linked above). While there are circuit diagrams, most are greatly simplified. One of the more complete schematics found in an image search was that shown in Figure 7.1 on this page, and even that is greatly simplified as it doesn't show the control circuit needed to ensure that the EMR is open before drive is removed from the SSR section. Not that it's especially difficult - both relays are turned on at the same time (the SSR will always be first to conduct), and a simple timer will ensure that the EMR is deactivated perhaps 10ms before the SSR drive is removed.
It appears that hybrid relays are comparatively 'new' components that have not reached their potential. Simple switching functions are the most common processes in power applications, and it's probably only a matter of time before hybrids become more readily available. Having said that, I certainly wouldn't suggest that you hold your breath waiting - many industry people probably don't even know these products exist. However, it is certainly one of the best ways to ensure long contact life and low EMI for any switching system.
It should be noted that hybrid relays are not suitable for safety-critical applications, where it may be mandatory that protection is provided by mechanical separation of contacts with no part bridging the contacts themselves. Because they use semiconductors, hybrid relays can (and some will) fail, and the most common failure mode for any semiconductor is short-circuit. However, if used appropriately, this is quite possibly one of the best solutions currently available. Cost is (of course) a consideration here, and I was unable to locate any pricing info on any hybrid relay currently available.
One area where a MOSFET hybrid relay would be ideal is for loudspeaker DC protection. DC voltages above 30V at any significant current are notoriously difficult to interrupt, causing a large and destructive arc across the contacts that can destroy the relay (as well as the 'protected' loudspeakers). A hybrid solution takes these difficulties away, and the parallel EMR means that there is no added distortion because the MOSFETs are shorted out in normal operation. Unfortunately, this isn't quite as easy as it sounds though, because of the requirement for floating power supplies to provide MOSFET gate voltage. This issue has been solved (at least in part) by the introduction of a new MOSFET driver IC (the Si8751/2 - referenced in the ESP article and in Project 198 (MOSFET Solid State Relay). Also, see Project 227, which is a hybrid relay designed for loudspeaker protection.
To ensure maximum contact life, arc suppression is vitally important. The best solution is one that prevents the arc from igniting in the first place, but this can be very difficult to achieve. Use of snubbers, diodes, TVSs or MOVs will hopefully prevent the arc from starting, or at least will draw sufficient energy away from the arc so that it can extinguish well before the contacts are at their maximum separation. Be careful is you use MOVs, as they experience a 'wear-out' phenomenon that causes degradation over time. This can result in the MOV exploding or catching on fire (I've seen both happen at different times). A TVS diode is more expensive but likely to be more reliable unless the MOV is specifically designed for repeated over-voltage.
Getting a reliable solution can take some experimentation, but if it's not done there is always a risk. As already noted, DC is fundamentally evil, and it can be very hard to prevent an arc from forming once you have a voltage over 30V or so. While solid state relays can solve the problem, they are not always appropriate. Most SSRs can't be used with audio signals because they create gross distortion. Bidirectional MOSFET relays are one solution, but they are expensive and are likely to remain so.
Hybrid relays can be used, and with some ingenuity you can build your own, using a conventional relay, a TRIAC and optocoupler, a simple zero-crossing detector to get a reference point, and a microcontroller to look after the timing. This can be done with a budget 8-pin micro for most applications, and it's not at all difficult. If the load is inductive, you need to switch on at (or near) the peak of the AC waveform, and for capacitive, electronic or resistive loads (including incandescent lamps) you need to switch on just after the zero crossing.
Electromechanical relays will nearly always have lower losses than their 'solid state' equivalent. Most TRIAC and SCR based SSRs will show a voltage drop of around 1V, and the device will dissipate around 1W per amp of load current. So, if the current is 10A you must be able to dissipate 10W of heat - that requires a heatsink. An equivalent EMR may have a contact resistance of less than 10 milliohms (0.01Ω), so the contact dissipation will be no more than 1W for the same current.
Even this is higher than you'll normally find. Note that you can't measure the resistance with an ohmmeter because there's not enough current to ensure proper contact. I checked the octal relay I used for most of my testing, and my ohmmeter claimed over 0.6Ω, but a test using 1A DC and measuring the voltage across the contacts showed that the actual resistance was 12mΩ. This gives a dissipation of 12mW at 1A (calculated as I²R) which is easily handled by the contact assembly itself. A more recent test at 10A AC showed the resistance to be 6mΩ, so the contacts will dissipate only 600mW. Most power relays will be similar.
Part 1 - Types, Selection & Coils
1 Relay Care
2 ENG_CS_13C3236_AppNote_0513_Relay_Contact_Life_13c3236r.pdf
3 ENG_CS_13C3203_Contact_Arc_Phenomenon_AppNote_0412.pdf
4 ENG_CS_13C9134_Contact_Load-Life_AppNote_0613_13C9134_-_Relay_contact_performance_enhancement.pdf
5 SSR + EMR Hybrid Relays
6 Solid State Relay Handbook
7 Hybrid Relay Switching - Echola Power Systems (The original link has gone, but there is some info on the Net.)
8 NAiS COMPACT PC BOARD POWER RELAY - JW Relays (Matsushita Electric Works, Ltd.)
9 Blowout Magnets - What They Are & Why Use Them? (Durakool)
| Main Index
Articles Index
|