|
|
| Elliott Sound Products | Relays & How To Use Them - Part 1 |
 Main Index
Articles Index Main Index
Articles Index
|
Relays (and in particular the electro-mechanical types) might seem so-o-o last century, but there are countless places where it simply doesn't make sense to even consider anything else. Although one could be forgiven for thinking that there must be a better way to switch things on and off, in many cases a relay is the simplest, cheapest and most reliable way to do it. Relays are electro-mechanical devices, in which an electromagnet is used to attract a moveable piece of steel (the armature), which activates one or more sets of contacts. The relay as we know it was invented by Joseph Henry in 1835. It has been in constant use ever since, and they are likely to be with us for many decades to come.
This article mainly covers 'conventional' (i.e. electro-mechanical) relays, but there are also several different types of solid-state relays. We'll look at some of those later, but very few are suitable for use in audio circuits. Some shouldn't even be used to turn on transformers, even though their specifications may lead you to think that they would be ideal.
Relays are not well understood by many DIY people, and there are many misconceptions. The purpose of this article is to give a primer - what the Americans might call "Relays 101". It's not possible (or necessary) to describe every different relay type, because they all operate in a similar manner and have more points of similarity than differences. Relays are used in nearly all automation systems, both for industrial controllers and in home automation systems. One of their great benefits is that when off, no power is drawn by the relay itself or the load. There is virtually no 'leakage' current via the contacts, and the insulation materials will normally have a resistance several gigaohms (GΩ).
Many websites discuss relays, but the intention here is not just to provide a primer, but to look at ideas that will be new to many, and possible pitfalls as well. There are places where relays are used where you might expect them to last forever, but they don't. Since relays are normally so reliable, we need to examine the things that can go wrong, and learn how to specify a relay for what we need to do.
There are thousands of different relays on the market. They range from miniature PCB mounting types intended for switching signal or other low voltage signals, up to very large industrial types that are used to start big electric motors and other industrial loads. These are usually referred to as 'contactors', but that's nothing more than a different name for a really big relay.
Being electro-mechanical devices, this means that there are both electrical and mechanical components within a relay. The electrical part (not counting the contacts) is the actuating coil, which is an electromagnet. When current passes through the coil winding, a magnetic field is created which attracts the armature (i.e. a solenoid). Provided there is enough current (known as the pull-in or 'must operate' current), the armature will be pulled from its rest position so that it makes contact with the remainder of the magnetic circuit. In so doing, the relay contacts change from their 'normal', 'rest' or 'reset' position to the activated or 'set' position.
A single electromagnet can activate several sets of contacts, but in most relays the number is generally no more than four sets. More may cause problems, because the armature will have to be able to move too many parts, so the return spring needs to be more powerful as does the electromagnet. The contact alignment also becomes critical, to ensure that every set of contacts opens and closes and has sufficient clearance for the intended voltage. Some of the things that make relays so popular are ...
It should be noted that automotive relays are a special case, are specifically designed for use with low voltage (12 or 24V) use, and one end of the coil is often connected to internal parts of the relay. Automotive relays must never be used with mains voltages, or where there is a significant voltage difference between the coil and contacts. The insulation is not rated for high voltages, even if the coil is not connected to anything internally. Most also draw significantly more coil current (typically 200mA or more) than 'general purpose' types (40-50mA). However, automotive relays are also rated to handle up to 150A or more at 12V DC.
It's quite easy for a microcontroller to activate a small relay, which activates a bigger relay, which in turn activates a contactor to power a large motor in an industrial process. This can be thought of as a crude form of amplification, where a very small current may ultimately result in a huge machine starting or shutting down. There's even something called 'relay logic', where relays are literally used to implement logic functions (see Relay Logic for a bit more info on this seemingly odd usage).
The references have more information and for some very detailed explanations, reference [ 1 ] is worth a read.
The essential parts of a simplified relay are shown below. In most relays, the coil is wound on a former (or bobbin), and is fully insulated from everything else. The coil (solenoid) along with the rest of the magnetic circuit is an electromagnet. Most relay specifications will tell you how much voltage you can have between the two sections, and it's not uncommon for relays to be rated for 2kV isolation or more. Don't expect miniature relays to withstand high voltages unless you get one that's specifically designed for a high isolation voltage. We'll look at this in more detail later.
The relay is shown as de-energised (A) and energised (B). The coil is usually not polarity sensitive, and can be connected either way. Be aware that there are some relays where the polarity is important, either because they have an in-built diode, they use a permanent magnet to increase sensitivity (uncommon), or because they are latching types. Latching relays are a special case that will be looked at separately. The contact assembly is made from phosphor-bronze or some similar material that is both a good electrical conductor and is flexible enough to withstand a million or more flexing (bending) movements without failure. The contacts are welded or riveted into the contact supports/ arms and can be made from widely different materials, depending on the intended use.
The contact 'arms' are typically fastened to the body of the relay mechanism, sometimes with rivets, occasionally with screws. Each contact is separated by a layer of insulation, and the contacts are usually also insulated from the magnetic circuit (the yoke and/or armature). The separate parts of the contact assembly are insulated from each other. Not all relays have a physical spring to return the armature to the rest position. In some cases, the contact arms are designed to act as springs as well. You will also see relays that have the moving contacts attached directly to the armature - the octal base relay shown in Figure 1.2 uses this method.
The relay shown has contacts that are most commonly called 'SPDT', meaning single-pole, double-throw. The term 'double-throw' means that one contact is normally open ('NO') with respect to the common, and the other is normally closed ('NC'). The 'normal' state is with the coil de-energised. When the rated voltage is applied to the coil, enough current flows so that the armature is pulled in to close the magnetic circuit, the 'NO' terminal is now connected to common, and the 'NC' terminal is open circuit.
This allows you to disconnect one signal or load of some kind, and connect a different one. Alternatively, a circuit may be operational only if the relay is de-energised, and is disconnected when power is supplied to the coil. Another very common configuration is called DPDT - double-pole, double-throw. This provides two completely separate sets of contacts, with both having normally open and normally closed contacts. 4PDT is now easily decoded - it means 4-pole double-throw. You will also find SPST relays - a single set of (usually) normally open contacts.
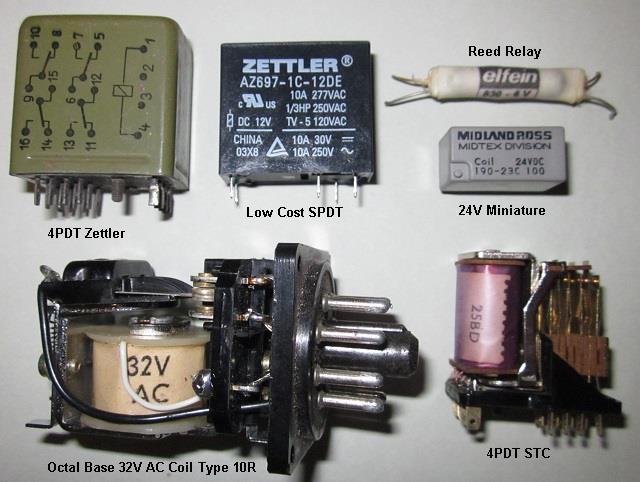
The photo shows a very, very small sample of relays, picked to show the diversity and the internals of some typical components. There are many others, including many different styles of reed relays as well as several intermediate sizes of conventional relays. You can see that one relay has an octal base - exactly the same as used for many thermionic valves ('tubes' if you must). Although the relay I have shown is many years old, this style is still available, because it makes it easy to replace relays in industrial control systems.
In fact, there are very few relays that have been discontinued. There may be changes to the contact materials (see below for more) and cases might change from metal/ Bakelite to plastic, but the basic styles and contact configurations have remained. There are so many controllers that rely on relays used in industrial processors that replacement relays tend to be made available for an eternity compared to 'consumer' goods. Relays are not an audio product - they belong to a different class of equipment where failure may mean the loss of $thousands an hour. However, they also have a place in audio, as seen in several ESP project articles.
It should be remembered that relays were first used in telegraphy, followed by telephone systems, so they are the product of the first ever branch of 'audio' and the catalyst for most electronic equipment - the telephone. Like so many of the things we take for granted these days, the telephone system has been the originator of a vast array of products and techniques that are now part of almost everything we use. If you wish to see an early example, it's covered in 'Morse Code - The start Of Electronic Messaging'. The term literally came from the use of 'relay stations' that were required to transmit messages over distances greater than could be covered with a single telegraph link. Initially, this was done manually (receive & transcribe the message, then re-transmit it to the next station - preferably without errors!), until the electromechanical relay (EMR) was developed. This cut out the 'middle-man'. Time has only increased the number of relays as we know them, with no sign of them vanishing anytime soon.
There's a special class of relays that are intended for protecting 'life-and-limb'. Standard relays are generally extremely reliable, but they don't have the necessary internal structure to qualify as a true safety relay. In general, unless a relay datasheet specifically states that the design meets the requirements for a safety relay, assume that it's just an electromagnetic switch. Safety relays are designed so that it is impossible for both normally-open and normally-closed contacts (NO/ NC) to be closed simultaneously, even if one contact set is welded closed due to excess fault current or other internal contact damage. This isn't easy to achieve!
The contacts of a safety relay use 'force-guided' contacts, where no fault can allow both sets of contacts to be closed simultaneously, regardless of internal contact failure. Many/ most 'standard' relays rely on the spring tension of the 'common' contact support for return action (most contact supports are phosphor-bronze or similar high-conductivity spring material). A force-guided relay uses the armature's return spring to actively pull the normally open contacts open when the relay is deactivated. Contact arm 'springiness' is no longer a potential limitation, and in many small relays, it's the 'springiness' of the common contact arm that provides the restoring force to the armature. Most 'true' safety relays use a combination of two or more relays, interconnected so as to provide a fail-safe power disconnection on demand. Full coverage of safety relays is outside the scope of this (and subsequent) articles, as they must be fully certified to be classified as a true 'safety relay'. Of course you can build one for yourself, but it won't be certified and may not meet the requirements of the 'real thing'.
Most safety relays also provide signalling contacts, so operation can be monitored remotely, for example as part of a multi-stage control system. Should any part of the system be shut down due to a fault, then all other equipment that forms part of the system as a whole will also be stopped. Safety relays are often connected to an approved 'Emergency Stop' button, and there may be several of these throughout a large system, typically wired in series so that a wiring fault (e.g. an open circuit) shuts down the system rather than leaving an emergency stop button inoperative. This would be unacceptable in any installation.
When it comes to safety systems, things become complex (and expensive) fairly quickly, because no-one wants to be killed or injured by a malfunctioning machine. For the relay circuits shown here, none is suitable for use as a true safety relay. Most are safe enough for a single circuit, but 'solid-state' relays (SSRs) must never be used where safety may be compromised by semiconductor failure. Almost all semiconductor switches fail short-circuit, including thyristors (SCRs or TRIACs), MOSFETs, IGBTs and bipolar transistors. Where safety is critical, a properly designed electromechanical system will win every time. This may be a little confronting to many people, as we tend to think of semiconductors as having an indefinite (not quite infinite) life. This is true when everything is designed properly, but failures must never compromise safety.
For any given relay, there are specifications that describe the maximum rated contact voltage and current. Relays for high voltages need contacts that are further apart when open, or may be operated in a vacuum. Those for high current need a contact assembly and contact faces that have low resistance and can handle the current without overheating or welding the contacts. The maximum contact ratings must never be exceeded, or the life of the relay may be seriously affected. In particular, make sure that the relay you use can handle the peak inrush current of the load.
There are many factors that influence inrush, but be aware that it can be as much as 50 times the normal full-load current. With inductive loads (transformers and motors for example) the worst case inrush current is limited only by the winding resistance plus the external mains wiring impedance. Note that zero-voltage switching (with solid state relays in particular) should never be used with these loads - ever! Capacitive loads and electronic power supplies present challenges, and are also generally not appropriate for solid state relays, but for different (and complex) reasons.
Some heavy duty relays (contactors) only have a single pair of contacts, typically normally open. There are also 3-phase contactors that have three sets of contacts - one for each phase, and these are very common in industrial control systems. They are used to switch heavy current and/or higher than normal voltage, and have greater contact clearance and arc suppression features so that an arc cannot be maintained across the contacts when they are open. For particularly large currents (or for DC which is a potential relay contact killer), there may be a magnet or even a forced air system to direct the arc away from the contact area. These are not common with normal relays.
Contact faces are made from various metals or alloys that are designed for the intended use. Some common materials and their applications are shown below [ 2 ]. This is not an exhaustive list, and you may see other metals or alloys referenced in relay specifications.
Material(s) Symbol(s) Comments Hard Silver Ag, Cu, Ni A standard contact material used in many general purpose relays, the copper and nickel add the hardness. Single contact minimum 20V/50mA. Long contact life, but tends to oxidise at higher temperatures. Silver Nickel Ag, Ni More resistant to welding at high loads than hard silver, with high burn out resistance. A good standard contact material. Minimum contact load, 20V/50mA Silver Cadmium Oxide Ag, CdO Used for high current AC loads because it is more resistant to welding at high switching current peaks. Material erodes evenly across the surface. Not recommended for breaking strong DC arcs because of the wear this creates (one side reductions). Minimum contact load 20V/50mA. Note that Cadmium was originally included in the list of materials prohibited under the European RoHS Directive, but is now exempt for this purpose (although this may change again at any time). Silver Tin Oxide Ag, SnO2 The tin oxide makes the material more resistant to welding at high making current peaks. It has a very high burn out resistance when switching high power loads. Low material migration under DC loads. Minimum contact load 20V/50mA. Useful where very high inrush currents occur, such as lamp loads or transformers. Silver Tin Oxide is frequently chosen as the replacement relay contact material for Silver Cadmium Oxide. Silver Tin Indium Ag, SnO, InO Similar to Silver Tin Oxide but more resistant to inrush. Minimum contact load 12V/100mA. Tungsten W More resistant to welding at high loads than hard silver, with high burn out resistance. A good standard contact material. Minimum contact load 20V/50mA single contact. Used for some heavy duty relays. Gold Plating - 10µm Au Used for switching low loads > 1mA/100mV. This plating will be removed by friction and erosion after around 1 million switching cycles even in 'dry' circuits (i.e. those with no DC and/or negligible AC). Used in single and twin contact forms (twin contact is useful in dusty environments). Gold Plating/Flash - 3µm Au Has the same qualities as 10µm Au but is less durable. It is generally used to prevent corrosion / oxidation of relay contacts during storage. Ruthenium Ru A rare element that is highly resistant to tarnishing, and used primarily in reed switches/ relays and other wear resistant electrical contacts. Rhodium Rh A rare, silvery-white, hard, and chemically inert transition metal. Like Ruthenium, it is a member of the platinum group of elements. Used in reed switches Table 2.1 - Common Contact Materials
From the above, you'll see that some contact materials require a minimum voltage and/or current. At lower voltages and currents (such as 'dry' signal switching circuits) there isn't enough current to ensure that the contacts will make a reliable closure, which may result in noise, distortion or intermittent loss of signal. Mostly this isn't a problem, but it's something you need to be aware of.
Where good contact is needed with very low voltages and currents, gold or gold plating is a good choice. Note that gold is not a particularly good conductor, but it has the advantage that it doesn't tarnish easily, so there's rarely a problem with oxides that may be an insulator at normal signal voltages. Where silver (or many of its alloys) is used, relays may be hermetically sealed to prevent oxidation. The black tarnish (silver sulfide) is an insulator. It's not a good insulator, but it can withstand a few hundred millivolts (typical signal level) with ease. Some reed relays have the contacts in a vacuum, and this is common with high voltage types. An arc is difficult to create in a vacuum because there is no gas.
A common term you will hear is 'contact bounce'. When the contacts close, it's more common than not that there will be periods of connection and disconnection for anything up to a few milliseconds or so. The time depends on the mass of the contacts, the resilience of the contact arms and the contact closing pressure. A good example is shown below, taken from the reed relay shown in Figure 1.2. This is significantly better than most others, but shows clearly that even the 'best' relays have contact bounce. A certain amount of 'disturbance' can also be created when contacts open, but this is a different effect.
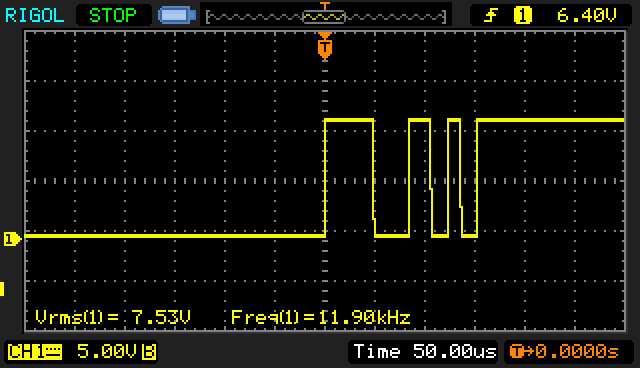
The horizontal scale is 50µs per division, so you can see that the contacts make and break several times in the first 150µs. After that, the closure is 'solid', with no further unwanted disconnections. Sometimes you can minimise bounce effects by operating two or more sets of contacts in parallel, but that's not a guaranteed reliable method. Once one could purchase a mercury-wetted relay - the 'contacts' were based on a small quantity of mercury which formed an instant contact with no bounce at all. There are (were) many different types at one stage.
Mercury-wetted relays used to be common for laboratory use to obtain test waveforms with pico-second risetimes, but of course the European Union's RoHS legislation has caused them to be banned completely. Mercury? Oh, no - you can't use that! Strangely, the EU still allows fluorescent lamps (both compact and full size) a few of which probably have as much mercury as a small laboratory mercury wetted relay. One gets thrown away after a few thousand (or hundred) hours and the other will be kept forever. I'll let you guess which is which.
The vast majority of relays have break-before-make contacts. This means that one circuit is disconnected before the other is connected. Make-before-break relays also exist, but they are uncommon and were mainly used with telephony systems where a disconnection might result in a dropped phone call. If you really need make-before-break I expect that finding one that's both available and sensibly priced will be a challenge. If you need this functionality, see Project 219.
One area where electro-mechanical relays have real problems is switching DC. A relay that can handle 250V AC at 10A can generally be expected to handle a maximum of 30V or so with DC, because the voltage and current are continuous. With AC, both voltage and current fall to zero 100 or 120 times each second (for mains frequency applications), so the arc is (comparatively) easily quenched as the contacts open. With DC, there is no interruption, and an arc may be maintained across the contacts - even when they are fully open.
This is a very serious issue, and is something that is overlooked by a great many people. Even if the relay contact voltage and current are such that the arc extinguishes each and every time, the mere fact that there is an arc means that the contacts are under constant attack. With an arc, material is typically moved from one contact to the other. With AC, the polarity is usually random, so contact material is moved back and forth, but with DC it's unidirectional. It takes a long time with very robust contact materials like tungsten, but it still happens, and eventually the relay will fail due to contact erosion. The manufacturer's ratings are the maximum AC or DC voltage and current that will give the claimed number of operations. If either the rated voltage or current is exceeded, the relay will probably have a short life. DC is the worst, and DC fault conditions are often catastrophic for a relay that's intended to provide any protective function.
In some cases a magnet can be used to help quench the arc created as the contacts open. Because the arc is conducting an electric current, it both generates and can be deflected by a magnetic field. Magnetic arc quenching (or 'blow-out') is rarely provided in relays, but it may be possible to add it later on provided you know what you are doing and can position the magnet(s) in exactly the right place. You might see this technique used in high current circuit breakers, and even in some relays (although they are more likely to be classified as contactors).
There are countless 'speaker protection' circuits on the Net that may not actually work when they are most needed. To see how it should be done, have a look at the way the relay contacts are wired for Project 33. When the relay opens it puts a short across the speaker, so even if there is an arc, it passes to ground until a fuse blows. Any speaker 'protection' circuit that doesn't short the speaker could leave you well out of pocket, because not only is the amplifier probably fried, but so is the relay and the speaker it was meant to protect. A relay that can actually break 100V DC at perhaps 25A or more is a rare and expensive beast, but that's what might be needed for a high power amplifier.
The subject of relay contact materials, arc voltages and currents, metal migration during make and break operations (etc., etc.) is truly vast. It's the subject of academic papers, application notes and large portions of books, and it's simply not possible to cover everything here. Suffice to say that manufacturer's recommendations and ratings are usually a good place to start, and the maxima should never be exceeded. The number of electrical operations can be extended significantly by de-rating the contacts (using 10A relays for 5A circuits for example), and AC is nearly always much less troublesome than DC.
This discussion covers snubbing networks and other measures that may be needed to protect the contacts from the load in Part 2. This is a very complex topic, and depends a great deal on the exact nature of the load. In many cases nothing needs to be done if the voltage and current are both well inside the maker's ratings. In other cases extreme measures may be needed to prevent the contacts from being destroyed. DC is the worst, and high voltage and/or high current will require very specialised relay contacts and arc-breaking techniques. If possible, consider solid state relays for DC, because they don't use contacts so can't create an arc.
This really is a science unto itself, and thanks to the InterWeb you can find a lot of really good data. Unfortunately, it can be very difficult to find information that is both relevant and factual, so don't expect to find what you need on the first page of the search results, and in general ignore forum or Usenet posts. There's a great deal of disinformation out there, and whether it's by accident, design, or just people claiming to know far more than they really do is open to debate. Suffice to say that a great deal of such 'information' is just plain wrong.
In a great many cases, the only way to get a solution that works is by trial and error. This is especially true if you have a difficult load - whether because the supply is DC, the load is highly inductive, or high currents and voltages are involved. For large-scale manufacturing, getting a custom design is viable, but the costs will be high and can't be justified for small runs or one-off projects. I've covered a very small subset of possible failure modes and contact erosion - there is so much more to learn if you have the inclination.
A common way to designate a relay's contact arrangements is to use the 'form' terminology. For example, you will see relays described as '1 Form C' in datasheets, catalogues and even in web pages on the ESP site. This terminology is roughly equivalent to referring to SPST or DPDT for example.
Form A Normally open (NO) contacts only Form B Normally closed (NC) contacts only Form C Changeover contacts (normally open, normally closed and common), Break before Make Form D Changeover contacts (normally open, normally closed and common), Make before Break ¹
¹ Uncommon, see below.
So a 1-Form-C relay has a single set of changeover contacts, 2-Form-A has two sets of normally open contacts, etc. Nearly all relays use break-before-make contacts. That means that during changeover, the normally closed contacts open before the normally open contacts close. Form-D (make-before-break) relays are very uncommon, and there's a period when the moving contact is connected to both the NO and NC contacts. Most 'Form D' relays that used to exist are now discontinued. If this is something that you really need, I recommend Project 219, which shows how to use a pair of break-before-make relays to achieve make-before-break. There are still some instances where this is necessary, but it's not a requirement in most cases.
One would think that this is too simple to even discuss, but it's definitely otherwise. The coil is an inductor, and because it's wound around a magnetic material (usually soft iron or mild steel) the inductance is increased. It's also non-linear. When the coil is not energised there's a large air-gap in the magnetic circuit, and this means the inductance is reduced. Once the relay is energised, the magnetic circuit is completed, or at least the air-gap is a great deal smaller, so now the inductance is higher.
I used an inductance meter to get the values shown below, but if you need an accurate measurement you'll have to use another method. The inductance is in conjunction with the coil's DC resistance, and that changes the reading so there's a significant error. True inductance can be measured by using a series or parallel tuned circuit with a capacitor to get a low frequency resonance (< 100Hz if possible) if you really want the real value. It's not often needed and you rarely need great accuracy, and although an inductance meter has a fairly large error used this way, but it's fine for the purpose.
Inductance meter measurements taken from two of the relays pictured above gave readings of ...
Octal Base 10R open 335 mH 186Ω Coil Resistance closed 373 mH STC 4PDT open 283 mH 248Ω Coil Resistance closed 303 mH
How large is the error? I checked the octal based relay using a series 5.18µF capacitor, and measured the peak voltage across the cap (indicating resonance) at 61Hz with the armature open and 37Hz with it closed. This gives an inductance of 1.3H open, 3.6H closed, so the error is substantial. There's plenty of scope to get the frequency measurement wrong too, because the 'tuned circuit' created has low Q and the frequency range is quite broad - expect the result to be ±25% at least, depending on how closely you can get an accurate peak voltage while varying the frequency. The formula is ...
L = 1 / (( 2π × f )² × C )
L = 1 / (( 2π × 61 )² × 5.18µ )
L = 1.3H
Although the error is large, the simple fact of the matter is that we don't really care. I included the inductance purely to demonstrate that it changes depending on the armature's position, but the coil inductance isn't provided by most relay manufacturers because you don't need it. These data are provided purely for interest's sake. Since inductance is part of the relay's 'being' (as it were), you can't do anything about it.
The combination of coil inductance and the moving mass of the armature means that relays will have a finite contact closure time. The actual time will vary from one relay to the next, but it's unwise to assume that it will be less than around 10ms for a typical SPDT 10A relay (such as the Zettler relay shown in Figure 1.2). I ran a test, and that relay provides contact closure in 9.8ms, not including contact bounce time. Smaller relays will be faster, and larger relays slower. This isn't something you'll find on most spec sheets, and the only way to find out exactly how fast (or otherwise) your relay is, will be to test it.
When power is applied to a relay coil, you might expect that it will pull-in instantly. However, the coil is an inductor, so the operating current is not reached as soon as power is applied. For example, with a 280mH coil, it may take up to 2ms before there's enough current to attract the armature. The coil current has to reach around 75% of the normal operating current (steady-state) before the magnetic field strength is great enough to attract the armature. The armature also has mass, so it has to accelerate from rest, and this takes time as well. The delay isn't usually a problem, but it does mean that you can't expect an electromechanical relay to provide instantaneous connections. If you need something to happen at a very precise time, then you'll have to use a solid state relay (see below for more information). It's not possible to guarantee accurate timing, even if multiple tests show it to be consistent. Over time, it will change due to mechanical wear and gradual contact erosion.
Because the coil is an inductor, it also stores a 'charge' as a magnetic field. When voltage is removed, the magnetic field collapses very quickly, and this generates a large voltage across the coil. The standard fix is to include a diode, wired as shown below (Figure 4.1A). However, adding the diode means that the relay will release slower than without it, because the back-EMF generates a current that holds the relay closed until it dissipates as heat in the winding and diode. The flyback voltage will attempt to maintain the same current flowing in the coil as existed when the current was being applied. Of course it can't do so because of losses within the circuit.
A relay coil's magnetic strength is defined by the ampere turns, and the current is defined by the coil's resistance. Let's assume as an example that a relay needs 50A/T (ampere turns) to activate reliably. A single turn with 50A will provide 50A/T, as will 10 turns with 5A, but they are impractical unless the relay is intended to sense an over-current condition (used for electric motor start switches for example). It will be more useful to have a larger number of turns with less current, so we might wind 1,000 turns onto the bobbin. The wire will be fairly fine, and may have a resistance of around 240 ohms. Now we only need 50mA to get the 50A/T needed, so applying 12V will produce 50mA through the 240 ohm winding. Since there are 1,000 turns at 50mA, that works out to 50A/T again, so we have the required magnet strength and a sensible voltage and current.
Please note that this info is an example only, and the actual ampere turns needed for a typical relay is fiendishly difficult to find on the Net. If you really need to know, you'll have to test it yourself by adding a winding with a known number of turns. If you add 50 turns and the relay pulls in at 600mA, that's 30A/T. Since you always need to allow for coil self-heating and/or a lower than normal supply voltage, you'd need to use more turns or a higher current. Most relays are designed to act with around three-quarters of the rated voltage. A 12V relay should activate with a voltage of about 9 volts. This does vary, and many datasheets provide 'must operate' and 'must release' voltages.
A pretty much standard circuit for a relay is shown below, along with a useful modification. A voltage is applied to the input (typically 5V from a microcontroller), and that turns on Q1 and activates the relay. Without D1, the voltage across Q1 will rise to over 400V (measured, but it can easily exceed 1kV) when the transistor is turned off, which would cause instant failure of Q1. D1 (sometimes referred to as a 'freewheeling' or 'catch' diode) acts as a short circuit to the back-EMF from the coil, so the voltage across Q1 can only rise to about 12.6V. However, as long as enough current flows between the relay coil and D1, the relay will not release. It may take several milliseconds before the armature starts to move back to the rest position after Q1 is turned off.
I tested a relay with a 270 ohm coil having 380mH of inductance - although the latter is not a specified characteristic in most cases. If you need to know the inductance you will probably need to measure it. With just the diode in circuit, there is enough coil current maintained to keep the relay energised for some time after Q1 turns off. The release time is a combination of electrical and mechanical effects. If the resistor (R2) is the same as the coil resistance, the 'flyback' voltage will be limited to double the supply voltage, easily handled by the transistor I used.
You can also use a zener and a diode, typically using a 12V zener. It can be rated for up to twice the applied voltage, in which case the peak voltage will be about 3 times the supply voltage. A zener is slightly better than the diode/ resistor combination shown, and is seen in more detail below. The graphs below show the behaviour of the circuit with and without the resistor and diode. The measured 400V or more is quite typical of all relays, which is why the diode is always included. Voltage peaks that large will destroy most transistors instantly, and while a high voltage transistor could be used that simply adds cost. The flyback voltage is created by exactly the same process used in the standard Kettering ignition system used in cars, but without the secondary winding. It's also the principle behind the 'flyback' transformer used in the horizontal output section of a CRT TV set (remember those?) or flyback switchmode power supplies.
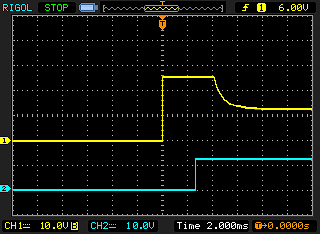
Workshop tests were done to see just how much voltage is created, and how quickly a fairly typical relay could be operated. I used the 'Low Cost SPDT' relay shown in Figure 1.2 for the tests. The results were something of an eye-opener (and I already knew about the added delay caused by a diode!). The relay I used has a 12V, 270 ohm coil and has substantial contacts (rated for 10A at 250V AC). With no back-EMF protection, the relay closed the normally closed contacts (i.e. the relay fully released) in 1.12ms - this is much faster than I expected, but the back-EMF was over 400V - it varied somewhat as the switch contacts arced on several tests. When a diode was added, the drop-out time dragged out to 6ms, which is a considerable increase, but of course there was no back-EMF (Ok, there was 0.65V, but we can ignore that). Using the diode/ resistor method shown above, release time was 4ms, and the maximum back-EMF was 24V (double the supply voltage). This is a reasonable compromise, since there are many transistors with voltage ratings that are suitable for the purpose.
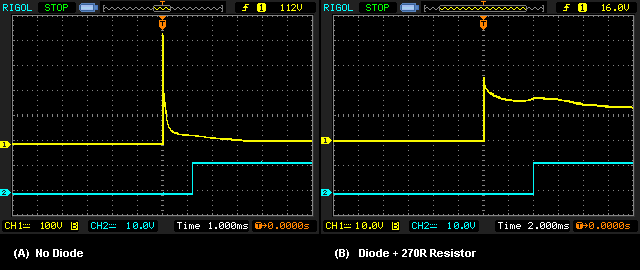
The blue trace shows when the NC contact is made as the relay releases, and is from zero to 12V. The peak relay voltage ((A) - No Diode) measured over 400V on my oscilloscope, and due to the voltage range little detail about the voltage collapse is visible. In both cases, the relays were wired in the same way shown in Figure 4.1, but using a switch instead of a transistor. The second trace shows the release time and voltage spike when a diode and 270 ohm resistor are used to get a higher release speed. The diode isn't essential, but without it the relay circuit will draw twice as much current as it needs because of the current through the resistor. Note that the horizontal scale is 1ms/ division in (A) and 2ms/ division in (B), and the vertical scale for the relay back-EMF (yellow traces) is also changed from 100V/ division (A) down to 10V/ division in (B).
The kink in the relay voltage curve is caused by the armature moving away from the relay pole piece and reducing the inductance. The 'NC' contacts close as the relay releases. As you can see, this is 4ms after the relay is disconnected (with the resistor + diode in place). With no form of flyback (back-EMF) suppression, the relay will drop out faster because the current is interrupted almost instantly (excluding switch arcing of course).
These graphs are representative only, as different relays will have different characteristics. You can run your own tests, and I encourage you to do so, but in all cases the behaviour will be similar to that shown. Upon contact closure of the normally open contacts, I measured 2.5ms of contact bounce (not shown in the above oscilloscope traces). These tests might be a little tedious, but are very instructive.
When the resistor has the same value as the coil's internal resistance, the back-EMF will always be double the applied voltage. If the resistor is 10 times the coil's resistance, the peak voltage will be 10 times the applied voltage (both are plus one diode voltage drop of 0.7V). This relationship is completely predictable, and works for almost any value of coil and external resistor. It's simply based on the relay's current. If the relay draws 44mA, the collapsing magnetic field will attempt to maintain the same current. 44mA across the external 270 ohm resistor will generate 12V, and if the resistor is 2.7k the voltage must be 120V (close enough).
While this trick was common with early electric clocks (but without the diode because they hadn't been invented at the time), it seems that few people use it any more. That's is a shame because it works well, limits the peak voltage to something sensible, and reduces the relay release time compared to using only a diode.
If you search hard enough, you will find it mentioned in a few places, and it's been pointed out [ 8 ] that simply using a diode can cause the relay to release too slowly to break 'tack welding' that can occur if the contacts have to make with high inrush currents. This can happen because the armature's physical movement is slowed down, and it doesn't develop enough sudden force to break a weld. It's far more complex than just an additional delay when a diode is placed in parallel with the coil.
|
The zener diode scheme shown above may be a bit more expensive than a resistor, but it allows the relay to deactivate much faster. The most common arrangement will be to use a zener rated for the same voltage as the relay's coil and supply. In the example, the release time was 2.6ms, and that's significantly faster than obtained using a resistor and diode (4ms). A higher voltage zener will be faster again, with a 24V zener giving a drop-out time of 1.84ms. If the voltage is too high you may end up needing a more expensive drive transistor to get the voltage rating, but using more than double the supply voltage won't improve matters by very much. Overall, this arrangement is probably the best compromise. It's faster than a resistor for not a great deal of extra cost, and doesn't require you to try to purchase parts that may not be readily available at your local electronics shop.
I also tested the circuit shown with a 100nF ceramic capacitor in parallel with the coil. The flyback voltage measured 86V, and the relay released in 1.23ms. That's a good result, but the voltage is higher than desirable and the cap needs to be a high-reliability type to ensure a long life. This makes it more expensive than other options, but there may be situations where this turns out to be the best choice for the application, with or without a series resistor.
Other transient suppression techniques can be used that don't affect the armature release speed greatly, including using a carefully selected TVS diode, a low voltage MOV or a resistor/ capacitor snubber network. The latter is generally not cost effective and is rarely used now, but was fairly common in early systems and is still useful with AC relay coils. If relays are to be used towards their maximum contact ratings, be aware that these are often specified with no form of back-EMF suppression, which ensures the fastest possible opening time for the contacts. If you decide to use a TVS, you either need a bidirectional type, or add a diode in series. MOVs will work well, but their clamping voltage is something of a lottery so you need to allow a safety margin for the switching transistor's peak voltage rating that accommodates the voltage range of the MOV (or TVS - they aren't precision devices either).
What about the diode ratings? The diode must be rated for the full supply voltage as an absolute minimum. That part is easy, because the 1N4004 diode is not only ubiquitous, but it's as cheap as chips. There aren't many applications where you need more than 400V relay coils. It can be tempting to use 1N4148 diodes, and although their voltage rating is usually fine, they are rather flimsy and their current rating is only 200mA continuous or 1A peak (1 second, non-repetitive). I don't really trust them for anything other than signal rectifiers, but a lot of commercial products use them across relays.
The diode current rating should ideally be at least the same as the relay coil current, not because it's needed but to ensure reliability and longevity. For most general purpose relays, the 1N4004 is a good choice - 1A continuous, 30A non-repetitive surge (8.3ms) and a 400V breakdown voltage. Remember that the peak current through the diode will be the same as the relay coil current, so if you have a (big) relay that pulls 2A coil current, you need a diode rated for at least 2A, preferably more. You can rely on the rated surge current for the diode, but it's better to allow a generous safety margin. The cost is negligible.
So, you may have thought that relay coils were simple, and you only need to add a diode so the drive transistor isn't destroyed when it turns off. Now you know that this is actually a surprisingly complex area, and there are many things that must be considered to ensure reliability and longevity. It's only by research and testing that you know the effects of different suppression techniques and the limitation that each imposes.
To confuse matters more, some relays are designed so that the coils can be run from AC, without any noticeable 'chatter' (vibration that causes noise - often very audible) and possibly continuous contact bounce. AC relays can usually be operated from DC with several caveats, but a DC relay coil should never be used with AC. Larger AC relays use a laminated steel polepiece, yoke and armature to reduce eddy current losses that would cause overheating, but this is not generally a problem with comparatively small relays. The current flow in a DC relay coil is determined by its resistance, but when AC is used there is a combination of resistance and inductive reactance - covered by the term 'impedance'. If the maker doesn't tell you the coil's current, it will have to be measured, as it can't be determined by measuring the coil's resistance.
There's a little secret to making the coil work with AC, and that's called a 'shading' ring (or shading coil). If you look closely at the photo of the larger octal relay in Figure 1.2, you can see it (well, ok, you can't really see it clearly, so look at Figure 4.4 instead). There's a thick piece of plated copper pressed into the top of the polepiece, and that acts as a shorted turn, but only on half the diameter of the centre pole. The shorted turn causes a current that's out-of-phase in its part of the polepiece, and that continues to provide a small magnetic field when the main field passes through zero. However unlikely this might seem, it works so well that the AC relay pictured above is almost completely silent, with no chatter at all.
This is the very same principle as used in shaded-pole AC motors (look it up if you've never heard the term). The small magnetic field created by the shading ring is enough to hold the relay's armature closed as the main field passes through zero, eliminating chatter and/or high speed contact movements that would eventually wear out the contacts just by the mechanical movement. Chattering contacts will also create small arcs with high current loads that will damage the contacts and possibly the load as well.
AC relays can be used with DC, but a few problems may be encountered. You will need to reduce the DC voltage by enough to ensure that the coil can pull in the relay reliably but without overheating. You might also experience possible armature sticking - see below for more info on that phenomenon. In my case, the 32V AC relay works perfectly with 24V DC, but it draws almost double the current that it does with AC. The coil has a resistance of 184 ohms and draws 62mA at 32V AC - an impedance of 516 ohms. For roughly the same current, it should be operated at no more than 12V DC, but it will not pull in at that voltage. At 24V DC the coil will draw 129mA and dissipate over 3W, and it will overheat. The pull-in current with 32V AC is 104mA, because the inductance is low when the armature is open and more current is drawn. That means that the impedance is only 307 ohms when the armature is open.
Never use a DC relay with AC on the coil, as it will chatter badly and may do itself an injury due to the rapid vibration of the armature. Contacts will almost certainly close and open at twice the mains frequency rate (100 or 120Hz). If you must operate a DC relay from an AC supply, use a bridge rectifier and a filter capacitor. Release time will depend on the value of the filter cap, coil resistance, etc. If there is a capacitor across the relay coil of more than a few microfarads (depending on relay size of course), you don't need a diode because the capacitor will absorb and damp the small back-EMF. You can still include the diode if you like - it won't hurt anything, but it won't do much good either.
The yoke and armature of most relays is usually just mild steel, not the 'soft iron' that you'll see claimed in many articles. Mild steel is magnetically 'soft' in that it doesn't retain magnetism very well (holding a magnetic field is known as remanence), but it does have some remanence so may become slightly magnetised. This can lead to the armature sticking to the polepiece, and that can be a real issue. If the armature sticks, the contacts will not release back to the 'normal' state when coil current is removed. This can be overcome by a stronger spring, but then the coil needs more current to pull in the armature against the tension provided by the spring.
In many DC relays, the centre polepiece may have either a very thin layer of non-magnetic material on the top (where the armature makes contact) or a tiny copper pin, placed so that the armature can't make a completely closed magnetic circuit. This small gap is designed to be enough to ensure that the relay can always release without resorting to a stronger spring. You will almost certainly see this technique applied in 'sensitive' relays - those that are designed to operate with the lowest possible current.
With AC relay coils, if you need back-EMF suppression then you have to use a bidirectional (non-polarised) circuit. This can be a TVS with suitable voltage rating to handle the peak AC voltage, two back-to-back zener diodes, again with a voltage rating that's higher than the peak AC voltage, or a resistor/capacitor 'snubber' network. It may be necessary to allow a higher back-EMF than you might prefer to ensure that the armature returns to the 'rest' position without being slowed down by the suppression circuit.
This article will not cover drive circuits in any detail. This is simply because there are so many possibilities that it would only ever be possible to cover a small selection. Common circuits are shown throughout this article, but there are many others that will work too.
I've shown the most basic NPN transistor drive, where the relay coil connects to the supply rail and the drive circuit connects the other end to earth/ ground. A PNP transistor can be used instead, but used to switch the supply to the relay coil (the other end is earthed). Relays can be driven by emitter followers, but that's not very useful as a stand-alone switching circuit, but can be handy in some cases. Some relays with particularly low coil current can be driven directly from the output of an opamp, and using 555 timers as relay drivers is also common.
You can also use low-power MOSFETs (such as the 2N7000 for example), and once upon a time even valves were used to drive relay coils in some early test equipment and industrial controllers. There are dedicated ICs that can be used, and of course any relay can be activated using a switch (of almost any kind) or another relay. You might want to do that if a low power circuit has to control a high power load, and relays are used as a form of amplification. For example, your circuit might have a reed relay switching power to a heavy duty relay that applies mains power to a contactor's coil (if you recall from the intro, a contactor is just a really big relay).
Where switch-off time is particularly critical, controlled avalanche MOSFETs might be appropriate. These are specifically designed to allow any transient over-voltage to be dissipated harmlessly in the parasitic reverse-biased diode that's a standard feature of all MOSFETs. Don't push any MOSFET that is not specifically rated for avalanche operation (such devices may be classified as 'ruggedised' or avalanche rated) into forward voltage breakdown. For most relay applications I wouldn't even consider this approach, as it's simply not necessary for most 'normal' drive circuits. If you want to play with using avalanche rated MOSFETs, the IRF540N is a low cost MOSFET that should survive with no diode in parallel with the coil.
Driving AC relay coils is most commonly done using either a switch or another relay. It's certainly possible to make an electronic circuit that can drive an AC coil, but in general it would be a pointless exercise. The vast majority of all control systems will use DC coils, and it's an uncommon instance where AC coils are the only relay you can get that will handle the power of the controlled system (whatever it might be). If that is the case with a microcontroller or other IC based controller, then it's far easier to use a relay with a DC coil to switch power to the AC relay coil.
You need to be aware that switching the coil of a relay on or off can induce transients into low-level circuitry. PCB layouts generally need to be carefully optimised to ensure that the relay power - including the return/ earth/ ground circuit - is isolated from the supply used for the low-level circuitry. If this isn't done in audio circuits, clicks and pops may be audible when relays operate. For control or measurement systems, the relay coil transients may be interpreted as valid data, causing errors in the output. If you opt for a circuit using a diode and zener for example, the turn-off transient is very fast, which makes it more likely to induce transients into surrounding circuitry.
Taking relays to the extreme, you can even have relay logic! This used to be quite common for process controllers and other industrial systems, where control switches and relay contacts are arranged to create the basic logic gates - AND, NAND, OR, NOR and NOT (inverter) and XOR. One of the most common (and complex) forms of relay logic was used in telephone exchange ('central office') switches. These interpreted the number dialled and routed the call to the requested destination - often through several exchanges. The exchange switches used a combination of conventional relays and rotary 'stepper' relays. A uniselector worked on one (rotary) axis, and the step-by-step two axis stepper (one rotary and one vertical) was commonly known as a Strowger switch after its inventor. Later exchange switches used a crossbar matrix switch, with the last of them being electronically controlled.
The diagrams used to describe relay logic are generally referred to as 'ladder' diagrams, and you'll also see the term 'ladder logic' used. This used to be (and perhaps still is in some cases) a required area of study for anyone involved in industrial electronics. It is so entrenched that many microprocessor based control systems are still programmed using a ladder diagram, even though most of the functions are in software. One manual I saw for a 'logic relay' extended for nearly 300 pages!
The three drawings above show the fundamental logic building blocks - AND, OR and XOR (exclusive OR) gates. Diodes are omitted for clarity. With an AND gate, Input1 AND Input2 must be high to energise the two relays, and the circuit is completed. In the second, if Input1 OR Input2 is high, the circuit is completed. It remains so if either or both inputs are high. The final one is the XOR gate. The output will be asserted only if Input1 and Input2 are different. If both are high or low, the circuit is not completed. Inverse versions (NAND, NOR) are achieved simply by using normally closed contacts instead of normally open as shown. There is no inverse for the XOR gate. Inverted logic can be used with relays in the same way as with semiconductor logic.
This is a very specialised area, and while it's certain that there are still some early relay based logic systems still in use, in most cases they will have been replaced many years ago. Unlike a microcontroller, re-programming a true relay logic system is generally done with hard wiring. All the required inputs are brought to the main 'logic' unit, and the outputs control the machinery.
Inputs can include push-buttons, pressure sensors, limit switches, thermal sensors, magnetic detectors and/or the output signals from another relay logic unit. Outputs are typically motors, heaters, valves for water, hydraulic fluid, gas, etc. Generally not thermionic valves (aka 'tubes'), although that's possible too - older high power RF amplifiers for high frequency welding systems for example.
Another related use for relays is a switching matrix. Crossbar telephone exchange switches are one example, but matrix switches are used to divert all manner of signals to a required destination, and to direct outputs of other equipment to the right place. Process control, automated test equipment, audio, video and RF switching matrixes are just a few of the possibilities. Reed relays are particularly well suited to matrix switching systems for low power signals.
Relay logic and matrix switching are vast topics, and I have no intention to go into any more detail. There is so much information and the applications so diverse that even scratching the surface would occupy several books. If you are at all interested, it's worth doing a search for 'relay logic' or 'relay matrix' - you'll be surprised at the number of web pages that are devoted to the topics.
Most detailed specifications for relays will provide the pull-in (or pick-up) and release (drop out) voltages. These vary widely depending on the relay's construction, but you might see figures that indicate that a particular relay should pull-in at 75% of the rated voltage, and should release when the voltage falls to 25% of rated voltage. Based on this, a typical 12V relay should pull-in at about 9V, and should release when the voltage has fallen to 3V. This is a test you might be able to run yourself, but in the majority of cases it doesn't make a lot of difference. The pull-in and release voltages may also be referred to as the 'must operate' and 'must release' voltages, and they vary with different relays.
Most circuits are designed to switch the power to relays quickly, commonly using a circuit such as those shown in Figure 4.1. The full voltage appears almost instantly, and when the transistor switch turns off the supply current is interrupted immediately. The relay current continues to flow via the diode, but that doesn't affect the actual voltage at which the relay releases. What these numbers do tell us is that once a relay has pulled in, a significantly lower voltage and current will keep it in the energised state. This means that it's possible to reduce the current and keep the relay energised. This leads us to ...
The time it takes for the contacts to move from one set of contacts to the other depends on many factors. One that I measured took 4ms to make the transition from NC to NO, which for the particular relay meant the moving contact had to move about 0.5mm (an average velocity of about 125mm/s if you think that's useful). This was reasonably consistent whether the relay was energised or de-energised, but without the diode the time was extended to almost 12ms due to contact bounce. Why? Because the armature can accelerate much faster without the diode, and the higher speed means more bounce. Pull-in time is dictated by the maximum available current (about 40mA for the relay I tested) and the coil inductance. Release time with the diode will generally be similar, but without a diode, acceleration is much faster. The diode (or other peak voltage suppression technique) is almost always needed, because the coil voltage can exceed 500V when the circuit is broken. (This is discussed in Section 4).
The test circuit is shown below. The output is normally low, and can only become high when both NO and NC contacts are disconnected. All 'standard' relays are break-before-make, and while make-before-break relays used to be available, they seem to have been discontinued.
As long as the moving contact is between the NO and NC fixed contacts, there is no current flow, so the output is pulled high by the 1k resistor. Without the diode, my scope counted (typically) more than 40 transitions when the relay is de-activated without the diode. With the diode, activation and de-activation showed 10-15 transitions - all the result of contact bounce. It's not often that you need to know the transition time, but in some instances it might be useful (not that I can think of too many). Understanding that contact bounce is very real is important, and knowing how it can be measured (for either contact) can be useful. The individual contact bounce for either contact by itself is measured by removing the connection to ground from the contact that you're not measuring.
There is one application where the release or drop-out voltage needs to be known. In some systems (especially battery operated), it may be important to get the maximum possible efficiency from a relay. This means that the coil is supplied with a low holding current after the relay has been activated. This is the minimum safe current that will keep the relay energised, and battery drain is reduced accordingly. Early systems used a resistor, but there are now ICs available that use PWM to modify the current profile after the relay has settled [ 3 ].
When first activated, the relay coil receives the full voltage and current for a preset period, after which the circuit reduces the current to a known value that will keep the relay energised. If you plan to use this type of device, you will need to know the coil inductance because that's needed so the proper PWM switching frequency can be set. A simple system such as that shown below may be all you need though. It doesn't have the high efficiency of a switchmode solution, but it's simple, cheap and effective. I've assumed a relay coil resistance of 270 ohms.

Looking at the simple R/C circuit, when Q1 is switched on, C1 is discharged and can only charge via the relay coil. The coil therefore gets the full voltage and current when Q1 is turned on, but as C1 charges, they are both reduced. It will eventually be reduced to exactly half the normal current, in this case about 22mA instead of 44mA. The same trick can be used with higher than normal supply voltages, allowing the resistor to limit the current to a safe holding value, but providing a 'boosted' current as the relay is energised. Putting up to 24V or so across a 12V coil momentarily usually won't damage it, provided the long term operating current is not more than the rated value. In most cases the coil current can be halved and the relay will not release. This must be tested and verified of course. The capacitor should be selected to give a time constant of at least 100ms, which is usually enough time for the relay to pull in properly. The time constant is determined by ...
t = R × C where R is the series resistance in ohms (R2), and C is in Farads (C1)
t = 270 × 470µF = 126ms
Using a larger capacitor is quite alright. The goal is to ensure that the relay gets a minimum of 90% of its full rated coil current for at least 5ms for typical small relays. A 470µF cap with the relay tested gives 40mA or more coil current for over 13ms - a good result. Heavy duty relays may need more time, and the capacitor should be larger than determined from the above calculations. There is no maximum value and all caps (above the minimum suggested) will work, but if too large the cap will be physically larger and more expensive than is necessary for reliable operation. Always test your final circuit thoroughly to make sure it works every time.
The pulse width modulation (PWM) driver is a little harder to understand unless you have some knowledge of PWM circuits feeding inductive loads. The PWM driver is 'symbolic' only, and does not represent any particular device. 'Ct' is a timing cap, used to set the operating frequency. When the circuit is triggered, the relay gets a steady current for a preset time (perhaps 1/2 second or so - the waveform is not to scale). Then the internal transistor turns on and off rapidly, usually at 20kHz or more. D1 is now either a very fast or preferably Schottky diode, and every time the switch turns off, back-EMF maintains current through the coil. If the final duty cycle is 50%, then the average current through the coil and diode will be 50% of the maximum (44mA reduced to 22mA for the demonstration relay). The advantage is that there is no power lost in an external resistor, and because of the switchmode circuit the current drawn from the supply will only be 11mA ... in a perfect world. In reality there will be some losses, so supply current may be a little higher than the ideal case.
The driver IC is a switching regulator, so the overall efficiency is much higher than the resistor-capacitor version. The cost is relative complexity, and the ICs are more expensive than a transistor, but if battery life is paramount then you don't have a choice, other than to use a latching relay. The current reduction can be well worth the effort if you need to conserve power. In many cases a microcontroller can be programmed to do the same thing, driving a switching transistor instead of the dedicated IC. Ideally, if you plan to use a PWM efficiency circuit, if possible get relays intended for that purpose. General purpose (solid yoke and armature) relays may overheat due to eddy-current losses if the ripple current through the coil is too high.
I ran a test of the PWM efficiency circuit on a general purpose 12V relay with a nominal 240 ohm coil and an inductance measured at 300mH. Even with a 1kHz drive waveform, there was only very minor heating detected in the yoke. For the 'main' test, I used a 1N4148 diode and a BC550 transistor (neither is ideal, but both ran almost cold) and drove the base with a 5kHz squarewave. The input current measured 48mA with a steady-state input, and it fell to 11.7mA when driven by a 50/50 squarewave. Although the voltage across the coil varies across the full 12.8V range (the diode forward voltage is added to the supply voltage), the current through the coil is fairly steady at 23.4mA with about 5mA of ripple, so eddy current losses are lower than you might expect. The fast switching waveform will cause interference in low level signals that are nearby, and that will probably rule out PWM control in audio or test and measurement applications.
Note that the measured inductance is wrong according to a low frequency test as described earlier, but we still don't care. Most inductance meters test at a fairly high frequency, and PWM is performed at a high frequency too. The measured inductance is a good indicator of the minimum PWM frequency that can be used, and if it turns out that it's higher than measured, that simply means there's less ripple current with PWM operation.
Regardless of the type of circuit, the optimum hold current may be more or less than the 50% used as an example. This means that the resistor value may not be the same as the coil's resistance, but is adjusted to suit the relay. Likewise, the duty-cycle of a PWM circuit may also need to be changed to suit the relay. The 50% figure works with most relays, but some will be happy with less, others may need more.
An unexpected advantage of using an 'efficiency' scheme (whether active or passive) is that the relay's release time is reduced because there's a much lower magnetic field and less back-EMF. However, this is something that you'd have to test thoroughly for your particular application, because every relay type will be somewhat different from others, even if superficially the same.
Keep in mind that the relay coil is temperature sensitive because of the thermal coefficient of resistance of the copper wire (about 0.004/°C). This can be approximated to 4% resistance change for each 10°C. When the relay coil is hot the pick-up voltage will be increased in proportion to the temperature. This may be because the coil has been operated for some time and become warm (or hot), or due to high ambient temperature. The drop-out voltage will also be increased, so the relay may release at a higher voltage than expected. In most circuits this is not a problem, but it is something you may need to consider in some applications.
There is at least one version of a very flawed efficiency circuit on the Net. The circuit uses normally closed contacts to short out the series resistor, so when the relay operates the short is removed and the resistor is in circuit. There's only one problem - the resistor is placed in series with the coil before the relay armature has contacted the polepiece. This means that the relay will probably never really close properly because its full current isn't available for long enough. If contact pressure is too low (as it almost certainly will be), resistance may be much higher than it should be and contact failure will follow, or it may not make contact at all. The idea might work with some relays, but may not work at all with others. It would be a clever idea if it could be trusted, but it's far too risky in a high current application. I strongly recommend that you avoid copying the mistake. I tested it, and the relay activated just far enough to open the NC contacts, but not enough to close the NO contacts. The armature was in limbo, at about half travel. Epic fail.
A technique that was once an option was to use an incandescent lamp in series with the relay coil. If chosen carefully, the lamp's cold resistance would allow the relay to pull in reliably, but as the filament became hot the resistance increased until equilibrium was achieved between the lamp and the coil. Unfortunately, this isn't an option any more, because the range of suitable incandescent lamps has shrunk to the point where it will be difficult to find one with the characteristics needed. Using a series lamp was never a 'precision' technique, but the user could usually find a lamp that was suitable. This will be very difficult now, but you might get lucky and find just the right lamp for the relay being used. However, don't count on it, and consider that the lamp may become unavailable at any time. 
Reed relays are often used when switching low-level ('signal') voltages. Because the contacts are hermetically sealed in a glass tube there is no risk of contamination, and the only limit to their life is mechanical wear of the contact surfaces. Because the contacts close and open with no sliding forces, mechanical wear is minimal. The reed switch is yet another product that came out of the telephone system - it was invented by an engineer at Bell Labs in 1936. Reed switches are used with a separate magnet for door and window switches for intruder alarms and for safety interlocks on machinery. When the magnet (attached to the moveable part of the door/ window) moves a few millimetres away from the switch, the contacts open signalling that the safety cover/ door/ window has been opened. There are countless other applications as well.
The reed switch itself uses two magnetic contact arms/ blades, one of which is flexible. There is no mechanical hinge or pivot, so reed switches can be considered to have no moving parts as such. The flexing of the moveable contact arm is designed to be well within the normal elastic range of the metal, so metal fatigue is not a limiting factor. A semi-precious metal is used for the contact faces. When the two contact arms are surrounded by a solenoid, one becomes magnetised with a North pole, and the other is South. Since opposites attract, the two contacts are drawn together, closing the circuit. In some cases a bias magnet is used to provide a normally closed contact, and the solenoid opposes the magnet to open the contacts. A bias magnet can also be used to increase sensitivity, but at the expense of being potentially unreliable in the presence of other magnetic materials. A bias magnet can also be used to create a latching relay, and the coil's polarity is reversed to open the contacts again.
Most reed switches have a single pair of normally open contacts, but there are versions with normally closed and changeover contacts [ 4 ]. A reed relay consists of the magnetically operated reed switch inside a solenoid. The two parts may be completely separate, or sealed into a small enclosure as seen in the photo above (top right, Figure 1.2). They are also installed in small PCB mount cases, looking somewhat like an elongated IC. Reed relays are mostly designed for low voltage, low current applications. The contact opening is very small and usually cannot withstand high voltage, although high voltage reed switches do exist! 200V AC at up to 1A is not uncommon. Reed switches and relays can be rated for billions of operations, depending on the load. If the voltage or current is towards the maximum rated for the switch it may last for less than 1 million operations due to contact erosion.
Reed relays are very fast. I tested the one shown in Figure 2 up to 1kHz, and it was switching at that speed. The output was more contact bounce than anything else, but at 500Hz there was an almost passably clean switching waveform (still with about 150µs of contact bounce though). Contact bounce notwithstanding, that is very fast for a relay of any kind. Operating it at that kind of speed isn't recommended because of contact bounce, and even at a rather leisurely 100Hz you get a billion (1E9) operations in a little over 115 days.
Reed switches were used for commutation of some high-reliability brushless DC fan motors before semiconductor Hall effect sensors became available. Even in this role the switches would most likely outlast the bearings ... somewhere in the order of 9½ years for a billion operations. No, nothing to do with relays as such, but interesting anyway.
If you ever need to know, reed relays typically need around 20-30 ampere turns to activate, so if you have to make your own coil for a reed switch you'll need to use about 1,000 turns at 30mA for typical examples. They vary, so you will need to run tests for yourself. It's obviously far easier to buy one than to mess around winding your own coil, but it can be done if you like to experiment. I tested one with 30 turns, and it required 1A (close enough) to operate, so that's 30A/T. Remember that you need to add a safety margin, so you'd probably aim for around 45A/T for a reed switch that operates at 30A/T to ensure that it will always pull in with the rated voltage - even if the resistance has increased due to self-heating of the winding.
There is one 'alternative' use for reed relays that's not discussed very often. For medium currents (up to around 10A DC), a reed switch can be used as a current detector - specifically over-current. This application is covered in the Electronic Fuses article, and it's been extensively tested. In theory, with four turns (and to achieve 30A/T) it will operate at ~7.5A, but in reality it operates at less than 5A. The sensitivity can be adjusted by moving the coil along the reed switch's glass body, with maximum sensitivity achieved when the coil is directly over the contact area.
The switch can be monitored by a microcontroller, operate an SCR to operate a standard (or MOSFET/ hybrid) relay to disconnect the power when the threshold is exceeded, and it maintains full isolation between the monitored and monitoring circuits. There's more info in Section 10.3. This is not a 'precision' sensor by any means, but it's far more accurate (and faster acting) than any fuse or circuit breaker. Because of its inherent speed, the monitoring circuit may require a delay to accommodate inrush current.
There are many different types of latching relay, sometimes also known as bistable relays (two stable states). A conventional relay is a monostable, having only one stable state. Some latching relays use an 'over-centre' spring mechanism similar to that used in toggle switches to maintain the selected state, and others use a small permanent magnet. There are single coil and dual coil types as well. A single coil is a bit of a nuisance because the driving electronics become more complex, but dual coil types are usually somewhat more expensive. With a single coil, the driving circuit needs to be able to provide pulses with opposite polarities, which typically requires four drive transistors rather than two. Latching relays have the advantage that no power is consumed to maintain the relay in the 'set' or 'reset' state.
However, there is a disadvantage as well. If power is interrupted while the relay is 'on', it won't release. When power is restored, the relay is still 'on', and that may have consequences for the circuitry (and/ or operator safety). If it's a requirement for the relay to be in the released state at power-on, additional circuitry is needed to force it to release. There will be a brief period when power is passed by the relay, before the 'power-on reset' circuitry can activate. Latching relays must never be used in safety-critical circuits, because unintended supply of power (which may be mains voltage) could cause injury or death. Attention to the smallest details is essential for any switching that has safety implications.
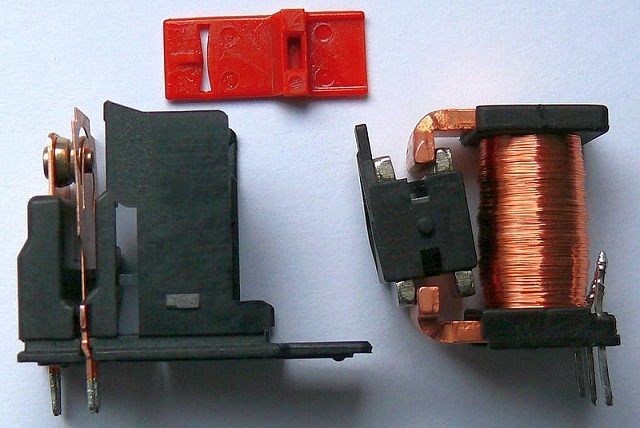
The photo shows one kind of latching relay - it uses a magnet with two pole pieces on the armature, which pivots around its centre point. The coil is centre-tapped, so it can be latched one way or the other by energising the appropriate half of the winding. This type of relay only needs a momentary pulse on the appropriate coil to set or reset the contacts, and the pulse will be in the order of perhaps 250ms. This means that the relay draws no power most of the time, only when it changes state.
Unless the relay has an additional contact set that can be used to monitor which state it's in, there's no way to know. Because it has two stable states, there is no real distinction between 'normally open' and 'normally closed' because both states of the relay are equally valid. For this reason, latching relays should never be used to turn on/off machines or power tools. For example, if there's a power outage while the machine is running, when power comes back on the machine will start again. This can easily create a risk of serious injury because the machine will start without warning.
If a microcontroller is used to drive latching relays, in theory it knows (thanks to the internal programming) which state the relay is in. However, if the equipment is portable and is dropped, the relay may change state due to the G-force created when it lands. Without separate contacts, the micro has no way to know that the relay's state has changed. This is a very real problem and it must be addressed in the software so that invalid states can be recognised and dealt with appropriately.
The drawing shows the way the relay works. The magnet assembly has a central pivot, allowing the entire armature to rock back and forth. When there is no power to either coil, the armature can be in either position and will be stable. If current is applied to the set (or reset) coil so the top of the yoke becomes a magnetic South pole, the bottom becomes North. In this state, the magnet and its pole pieces will be repelled from both ends, and will snap clockwise so unlike poles are together. Again, the relay can remain in this state indefinitely, until the other coil is pulsed briefly and it will change state again.
If the set coil is pulsed multiple times with no intervening pulses to the reset coil, nothing happens. Once the relay is in one state, multiple pulses or continuous current to that coil has no effect. It's only when the other coil section is pulsed that anything happens, and that will cause the relay to change state.
Below are two simplified circuits of dual-coil (A) and single coil (B) latching relay drivers. As is readily apparent, the dual coil version is far simpler, and just uses a transistor to connect one side of the coil or the other to ground to set or reset the relay. The two transistors should never be turned on at the same time because the relay state will be indeterminate when power is removed. Otherwise, no harm is done. Note the way the diodes are connected - this only works if the coil and drive transistors are connected as shown, and the peak voltage across the transistor that remains off is three times the supply voltage (3 x 12V or 36V in this case).
The single coil (B) is more complex, requiring another two transistors and resistors. Note that diodes can't be used to suppress the back-EMF because the polarity across the coil changes. Well, you can use diodes, but you have to add four of them. You need a diode from each end of the coil to earth/ ground, and another to the supply. The resistor shown (R5) is simpler and cheaper, and again assumes the coil resistance to be 270 ohms and limits the flyback voltage to double the supply (24V in this case). There should be no concern about the extra dissipation in the resistor, because it's on for such a brief period.
Some explanation is needed. If a signal is applied to 'Input 1 - Set', Q1 will turn on. This will turn on Q3 because the lower end of R3 is now at close to zero volts and Q3 gets base current. Q2 and Q4 remain dormant. Current therefore flows through Q3, the relay coil, then Q1 to ground. If voltage is next applied to 'Input 2 - Reset', Q2 and Q4 turn on, and current flow is now through Q4, the relay coil (but in the opposite direction), then Q2 to ground.
With the Figure 8.3 (B) circuit, it is imperative that the software (or other control system) can never apply a signal to both inputs at the same time. If that happens, all transistors turn on, and the transistor bridge becomes close to a short circuit across the supply. This will almost certainly cause transistor failure and may damage or destroy the power supply.
While it's possible to include a 'lock-out' function to prevent this type of failure, that will simply add more complexity. A crude (but probably effective) method would be to connect a Schottky diode between the base of Q1 to the collector of Q2, and another from the base of Q2 to the collector of Q1. When either transistor is turned on the diode bypasses any base current intended for the other transistor.
There are other ways a single coil can be driven, and if the relay coil voltage is significantly less than the supply voltage Q3 and Q4 can be replaced with appropriately sized resistors (270 ohms for a 24V supply and 270 ohm relay coil for example). If you use a resistor feed, the parallel resistor and/or diodes aren't needed. It's still far more effort than a dual coil relay though. Basically, the whole process just gets messy, and the moral of this story is quite clear - if at all possible, use dual coil latching relays.
There are also 'bistable' latching relays, where one impulse operates or 'sets' the contacts, and the next (on the same coil) 'resets' them. If this type of relay is used, there should always be a spare set of contacts that can be used for an indicator or to tell a microcontroller the current state of the relay. Without that, there is no way to know which contacts are closed, and such an arrangement must be used with great care if it controls anything that could cause damage if the relay is in the wrong or unexpected state at power-up.
A fairly common control application is where you have two push-buttons to turn a machine on or off. These are sometimes mechanical, but momentary contact switches can be used as shown above. Provided the safety interlock switch is closed, when the 'On' button (normally open) is pressed the relay energises. The circuit is completed by the first set of relay contacts (A) which cause the relay to remain energised. It will remain on for as long as power is applied, or until the 'Off' button (normally closed) is pressed or the safety interlock switch opens. Power to the equipment is provided by contact set B.
As shown the 'Off' button and safety interlock have absolute precedence, and as long as either is open, the 'On' button cannot switch the circuit on. There might be several additional contacts in series with the 'Off' button, perhaps used for sensing that a safety screen is in place or other switches that signal that the machine is safe to turn on. Should any safety switch open while the machine is in use, it will stop because the relay will de-energise. It cannot re-start until all interlock switches are closed and the 'On' button is pressed.
This is a very basic form of relay logic, acting as a set/ reset circuit with an 'AND' function in the 'Stop' circuit. The safety interlock and the 'Stop' button must be closed before the machine will operate. Including other logic functions is just a matter of adding more contacts, relays, sensor switches or external switching devices.
The common term is something of a misnomer, but anyone 'in the business' knows what a solid state relay (SSR) is, and may even know how to control them and what loads are safe with a given type. There is a huge variety of different types, not just for switching devices but for input requirements as well. Some SSRs are designed exclusively for use with AC, others are exclusively DC. A small number of commercial SSRs can be used with AC or DC. In this respect they are far more restrictive than conventional (electro-mechanical) relays, but they also offer some unique advantages. Needless to say, they also come with some unique disadvantages as well.
SSRs can use a wide variety of isolation and control techniques, including reed relays (which strictly speaking makes it a hybrid), DC/AC converters, mains frequency transformers, or (and most commonly) infra-red light within an IC package. This creates an optocoupler, and these outnumber the other techniques by a wide margin. If significant power is being controlled, the control circuitry may use various means to amplify the relatively low output current from the optocoupler [ 6 ].
Like conventional relays, SSRs provide galvanic isolation between input and output, commonly rated for 2-3kV as a matter of course. Rather than using a coil to operate the relay, most SSRs use an optocoupler, so the activating medium is infra-red light rather than a magnetic field. Where an electro-mechanical relay may require an input power of up to a couple of Watts, SSRs generally function with as little as 50mW, with some needing even less.
However, where the contacts of a conventional relay may dissipate only a few milliwatts, an SSR will usually dissipate a great deal more, with high power types needing a heatsink to keep the electronic switching device(s) cool. This is because the switching element is a semiconductor device, and therefore is subject to all the limitations of any semiconductor. This includes the natural enemy of all semiconductors - heat! Common switching devices are SCRs, TRIACs, MOSFETs and IGBTs, and each has its own specific benefits and limitations.
Be particularly careful if your application has a high inrush current. The worst case maximum current must be within the ratings of the SSR, or you run a very real risk of destroying your relay. SSRs have a bewildering array of specifications (some are more inscrutable than others), but the maximum allowable current will always be specified (typically as the 'non-repetitive peak surge' current). Note the use of the term 'non-repetitive' - that means whatever the maker says it means. It might be for 20ms (one cycle at 50Hz), it may also mean for some other specified duration (e.g. 1ms), and if you are lucky there will be a graph and even some info on how to deal with inrush current. For more information on this topic, please read the Inrush Current article.
Switching Used For Comments SCR ½ Wave AC Two are commonly used in reverse-parallel for high-power full-wave AC TRIAC Full Wave AC Generally only used for low power versions (10A or less for example) MOSFET AC or DC AC and DC versions are available, but are generally not interchangeable
To make things more interesting, many SCR and TRIAC based SSRs are available with internal zero-voltage switching circuitry. This means that when switching AC loads, the electronic switching will only allow the SSR to start conducting when the applied AC voltage is close to zero. This is a simple way to reduce electrical interference, but you must be aware that they are only suitable for resistive loads.
 | Never use a zero-voltage switching SSR with transformers or other inductive loads. Doing so ensures maximum possible inrush current, which can result in tripped circuit breakers and possible damage to the SSR itself. To see a complete article describing this phenomenon and more, read Inrush Current Mitigation. Inductive loads behave very differently from what you might expect when switched on! |
To see come of the techniques used for MOSFET relays, see the article MOSFET Relays which describes the various techniques that can be used. DC MOSFET based SSRs simply use a MOSFET and an opto-coupler. There is generally little or no advantage to using the pre-packaged version over a discrete component equivalent, except in cases where the certification of the SSR is needed for safety critical applications.
|
The general arrangement shown in the schematic of Figure 9.1 is common to most SCR and TRIAC based SSRs. The optocoupler can be purchased as a discrete IC in either 'instantaneous/ random' or 'zero-crossing' versions. In this case, 'instantaneous' simply means that the opto-TRIAC will trigger instantly when DC is supplied to the LED, regardless of the AC voltage or polarity at that moment in time. The zero-crossing versions will prevent triggering unless the AC voltage is within (typically) 30V from zero. Examples are the MOC3051 (instantaneous/ random phase) or MOC3041 (zero crossing).
As noted above, zero-crossing trigger ICs or packaged SSRs must never be used with transformer or other inductive loads, and they are completely unsuited for use in phase controlled light dimmers. They should be used when switching resistive loads (including incandescent lighting) or capacitive loads (some electronic loads might qualify). They are also commonly used for switching heaters, especially when thermostatically controlled, as there is almost no electrical noise when the AC is switched as the voltage is close to zero.
| Most TRIAC based solid state relays are not suited for use with electronic loads, and that includes lighting such as compact fluorescent or most early LED lamps. In some cases they might seem to work, but if the mains current waveform is examined you may see current spikes of several amps occurring every half-cycle - for a single lamp! This will (not might - will) eventually lead to failure of the lamp, the SSR or both. Electronic loads should only ever be switched using electro-mechanical or MOSFET relays, and should be tested thoroughly as a complete installation, and verified to ensure that operation is safe for both relay and load. |
You will no doubt have noticed that there are two prominent notes with regard to solid state relays. These are just two of the things that you have to be very aware of if you decide to include a SSR in your project. The comments regarding electronic loads are particularly important, and an 'electronic load' is anything that has a bridge rectifier across the mains, then uses a capacitor or active PFC circuit to create a DC voltage. Virtually all switchmode power supplies meet the definition of an electronic load, and therefore most cannot be controlled by a SSR unless such usage is specifically permitted in the datasheet. If it's not mentioned, then assume that it's not allowed. If you choose not to accept that this is true, you will almost certainly damage the load and probably the SSR as well. It's something that's not well documented, poorly understood, rarely tested properly and can cause significant damage, including the risk of fire.
You also need to carefully read through the documentation to make sure that your supply and load can never exceed any of the limits described in the datasheets. A momentary over-voltage generally won't cause the contacts of a standard relay the slightest pain, and even short-term excess current is usually not a problem. With a solid state relay, no limiting value can be exceeded ... ever. You also have to ensure that the voltage and/or current don't change too fast, because SCRs and TRIACs have defined limits, known as DV/DT (critical change of voltage over time) and DI/DT (critical change of current over time). If either is exceeded, the device may turn on unexpectedly. You will also see these terms written as ΔV/Δt and ΔI/Δt.
The maximum peak voltage can't be exceeded either, and woe betide you if the load draws more than the rated peak current. You also have to use a heatsink if the load current would otherwise cause the temperature to rise above the rated maximum (typical junction temperature might be around 100°C). There are many disadvantages, but sometimes there is no choice. For example, you can't use a mechanical relay in a 'phase-cut' dimmer because it can't act quickly enough. You also can't ensure that a mechanical relay switches on at a particular phase angle of the AC waveform - for example the ideal for an inductive load is to apply power at the peak of the AC waveform. This is easily done with a SSR.
The MOSFET relay shown above is based on the one described in the article MOSFET Relays. There are several types, including those intended for DC operation, but the one shown is a fairly common arrangement. Exact details will differ, but the general principles are the same. Some photo-voltaic couplers have the turn-off circuit (R2 + Q1) inbuilt, and it's needed because the MOSFET gates have extremely high impedance and significant capacitance. Without the turn-off circuit the MOSFET could remain (partially) conducting for several seconds after LED current is removed. Because the photo-voltaic cells have very limited output current, turn-on time may be much slower than expected.
The same principles are also used with a pair of IGBTs. These are useful for very high power or high voltage applications. IGBTs can also be used in DC solid state relays where a MOSFET may be unable to give the required performance. There are countless possibilities with semiconductor devices, but all components have limitations, and it can be difficult to make the right decision when there are so many variables. IGBT based SSRs are even available as miniature low current devices (around 1A), and the PVX6012 is an example if you want to run a search for the datasheet. It's worth reading, if only to see how they are made and see some specifications. They are non-linear and are unsuitable for switching signal voltages.
It's worth looking at the (generalised) advantages and disadvantages of semiconductor compared to electro-mechanical relays.
Advantages ...
Disadvantages ...
The inability of most SSRs to provide changeover contacts or multiple sets of contacts can be a serious limitation, and can also increase costs significantly. It costs very little to add another set of contacts to an electro-mechanical relay, but with the SSR you need an extra high current switching device, and an improved driver to suit. In most cases if you need a circuit to be normally closed with power off then you're probably out of luck. Such things do exist, but I've never come across one other than in datasheets.
Although solid state relays offer some worthwhile advantages, they have many limitations that will negate their use in a great many applications. Especially if you need multiple contacts or changeover (double throw), then you will have difficulty finding what you need and it will almost certainly be far more expensive than a standard electro-mechanical relay. In some cases it will be simpler and cheaper to make your own SSR using a suitable opto-isolator and SCR, TRIAC or MOSFET.
One area where MOSFET and IGBT based SSRs excel is interrupting high voltage, high current DC, which is fundamentally evil. At voltages over around 30V and if there is enough current available through the circuit, DC will simply arc across the contacts of most mechanical relays and switches. With enough current, the arc may melt the contacts and contact arms until the air gap is finally big enough to break the arc. Think in terms of an arc welder, because that's the sort of conditions that can exist with enough voltage and current. A MOSFET doesn't have that limitation, and can break any voltage or current that's within its ratings.
There are also many small (DIP6, DIP8 or SMT) MOSFET relays available. These are not suitable for high current, but some are likely to be a good choice for switching audio and other low-level signals. Voltage ratings range from around 60V up to 300V or more. Example include the G3VM-61G1 (60V, 400mA AC), LH1156AT (300V, 200mA AC) and PVDZ172N (60V, 1.5A, DC). These are chosen more or less at random, and there are hundreds of different types. As expected, all those I've seen are SPST normally open. Operating principles are much the same as described above, but everything is in a single package. For AC/DC types the voltage rating is the peak AC or continuous DC voltage.
For AC types (using two MOSFETs), generally you can expect the 'on' resistance and distortion to be low or very low, but the signal isolation won't be as good as a reed relay. Any leakage current will almost certainly be distorted, but will normally be only a microamp or less at typical signal levels and should be below audibility, but that depends on the load impedance. Overall performance of low voltage types will be similar to CMOS devices like the 4066 quad bilateral switch. However, you get much higher signal voltages and complete isolation between the control and switching circuitry. This can be especially useful for test and measurement applications.
Solid state relays should never be used as a safety-critical shut-off system. Because failure commonly means a shorted switching device, should the SSR fail the load will be permanently energised. You must know your load characteristics, and be aware that many SSRs may not turn off if the load has a characteristic that generates transients fast enough to cause spontaneous re-triggering of the SCR or TRIAC. Some non-linear loads may cause the SSR to trigger on only one polarity, causing half-wave rectification and a net DC component in the load's supply circuit (typically the mains). Some SSR problems (even if transient) can cause serious malfunctions in other equipment that shares the same power source. For example, transient half-wave rectification of the mains may cause transformer saturation, serious motor overload (saturation again), tripped circuit breakers and general havoc.
Here are a few things that don't really fit into any of the categories discussed so far, but hopefully you'll find useful.
If you happen to have a relay with a removable cover (they are quite common) you may find after a while that the cover either won't stay on or it rattles. The quick and easy way to make sure that the cover stays on is to apply a couple of drops of 'super-glue' (aka 'krazy-glue' in the US), and that will keep the cover on very nicely. There's only one problem - the relay will be ruined afterwards!
Super-glue and all cyanoacrylate adhesives give off fumes, but the nasty part is that the fumes carry microscopic particles of adhesive into places where you really don't want them - the contact surfaces for example! Yes, it's true. You can ruin a relay just by gluing the cover on. This happened to a friend, and he found that the normally open contacts no longer closed when the relay was activated. While I'm sure that the contacts could be made to work again with multiple activations of the relay, when something like that happens in a critical circuit it can no longer be trusted and the relay should be replaced. I don't know which adhesives would be safe in this case, but a water-based glue would probably be alright, as would hot-melt adhesive. Silicone based sealants/ adhesives may or may not cause a problem - I've not tested silicone and for the time being I have no need to.
If the contacts get a little pitted or just look like they need cleaning, beware of using 'emery' or any other abrasive paper. Yes, it will clean the contacts, but it will also leave behind minute particles of abrasive. Some of these particles will be just sitting on the contact surface, and others will be embedded into the contacts. None of the common abrasives is conductive, and there is always the possibility that the contacts may not make properly - if at all. Any abrasive particles must be removed, or you may have intermittent contact in the future.
One way to clean off any residue is to use paper - ordinary printer paper is usually good enough. Give it a very light spray with WD-40 or equivalent, and press the contacts together with your finger as you slide the paper between the contacts. Make sure that you apply enough pressure to make the paper contact both surfaces properly, but not so much that you deform the contact arms. You should do this several times with a clean piece of paper each time, until the paper comes out clean, with no residue of any kind. Despite the outlandish claims you may see that "WD-40 is evil and cannot, must not, be used with electronics" these claims are a complete fabrication. None of the 'water displacement' type sprays will harm most electronics, but be careful using them with some plastics.
Ideally, contacts will be cleaned using a contact or points file - a thin file specifically designed for cleaning between closely spaced contacts. However, I have never had a problem when using the method described above, and if you only need to remove light tarnish the paper alone may well be sufficient. The microscopic roughness of the paper is enough to remove silver sulfide (for example) very effectively. Never use a contact file on plated contacts. Many 'signal level' relays use a very thin layer of gold (which does not tarnish), but a file will remove it completely, rendering the relay useless for the task.
In the discussions about coils, ampere turns and other interesting titbits, a few tests were done with a reed relay to determine how many ampere-turns were needed to close the contacts. Taking this to the extreme, it means that a reed relay can be used to detect current, and in particular an overload. Will it be accurate? No, not really, but it will be capable of signalling to other circuitry that an over-current condition has been detected. Mostly, extreme accuracy isn't needed - if a circuit is meant to deliver 5A and suddenly you find it's drawing 10A or more, you only need to know that there's a problem, and can use the contact closure to shut down the circuit.
In this case, the reed relay coil is in series with the load, rather than being connected in parallel with a voltage source. Because heavy gauge wire can be used, the 'burden' (voltage dropped across the sensor) can be minimal. If you used a resistor instead and measure the voltage across it, you may lose anywhere between 100mV (10 milliohm resistor at 10A) to 1V (0.1 ohm resistor at the same current). With 0.1 ohm, you also waste 10W. The loss is much less with 10mΩ, but the resistor will be very hard to get, and you need more complex electronics to detect the voltage reliably.
I tested a reed switch and found reliable activation with 30A/T, so 30 turns will detect a current of 1A. By the same reasoning, 3 turns (of heavy gauge wire) should detect 10A, but will probably be less sensitive because 3 turns can't be spaced out along the length of the reed switch very well. If you want to use this technique you will have to experiment to get the detection threshold where you want it to be. You also have to accept that it's not a precision solution, but it will work without the need for low value shunt resistors, it will be extremely reliable, and needs no electronics at all. An example of the basic technique is shown below ...
|
The photo on the right shows a test version, using 8 turns (with three wires in parallel). It activates reliably at 4A, so the winding can be worked out to be 32 ampere turns. Not too different from the 30A/T I got while testing with 30 turns around the reed switch. In both cases the extra winding was simply wound around the outside of the reed relay shown in Figure 1.2, so the threshold was probably a little lower than it would be without the original winding, which increases the distance from the coil to the reed switch and therefore reduces the sensitivity. Needless to say, the relay can still be activated by applying 6V to the original coil, so it could be used as a dual-purpose relay. By playing with the polarity of each coil there are several new uses for the relay, as it can sense both voltage and current and can add or subtract them ... all in one small package.
If you make a current sensor using a reed switch, the switch and coil should be very firmly mounted to prevent movement. Even a small amount of relative movement will change the detection threshold, and be warned that a really serious overload can compress the coil purely by the power of the magnetic field. You also need to be mindful of the reed switch's maximum A/T rating. Some vendors publish figures for the maximum field strength, and some I've seen can be as low as 50A/T. For example, you might want to monitor the current from a battery pack. A shorted Ni-Cd battery can deliver a prodigious amount of current, and it may be sufficient to damage the reed.
These days you can get current detector ICs that use a Hall-effect device to measure the current, but you probably can't get them from your local 'walk-in' electronics shop, and because everything is done for you there's no fun to be had playing around in the workshop. You can also get ready-made reed switch current sensors, but they are not common. The reed switch approach also has many significant advantages [ 7 ], in that it doesn't need a power supply or any amplification to provide a useful output.
Some older (up-market) cars had lamp failure indicators that used reed switches with a few turns of wire around the outside. If a lamp failed, the reed switch would not close and some basic relay logic was then used to light a warning lamp. Compare this to a semiconductor approach that will use 10 or more components and a PCB to achieve the same thing.
A relay makes an ideal polarity protection device. Unlike using a diode or MOSFET, there is almost no voltage drop and no heatsink is needed even for high current loads. Very high current applications are easily protected - 150A at 12V is easy using a heavy-duty automotive relay (that would need a mighty big MOSFET!). The disadvantage is that the relay coil draws current, so the technique is not suitable for applications where current drain must be minimised. It is possible to include an 'efficiency' circuit as described above, but IMO there's not much point - especially if the load draws a high current anyway, and that's where this arrangement is best suited.
The relay contacts are never expected to break the load current, so even fairly high voltages can be accommodated quite safely.

The circuit shows how it's done. If the incoming supply is the wrong polarity, the relay coil gets no power because it's blocked by D1. Without power, the normally open contacts remain open, and no power is supplied to the load. The relay can only be energised if the incoming DC is the correct polarity, and the circuit will provide DC to the load only when the normally open contacts are closed.
If you want, add an LED as shown. If the supply is connected the wrong way, the LED will come on as a warning. Alternatively you can just use another LED with a series resistor after the contacts to indicate that the polarity is correct and power is available. You can use a 1-Form-A (SPST) relay with only a normally open contact set if you wish. The 'NC' contact is not needed for polarity protection.
This circuit can also be used in a battery charger for example. In that case, you's use it with the battery as the 'DC Input', so it will only work if the battery connection is the right polarity and when the relay closes it will connect the charger. Naturally, this can't work if the battery is heavily discharged or completely dead and there's not enough voltage to energise the relay. If you use it for a lead-acid battery, the battery will likely be ruined if the voltage is too low to energise the relay, so whether it connects the charger or not is a moot point.
It's also worth pointing out that the techniques described here apply equally to other magnetically operated devices - in particular, solenoid actuators of all kinds. There is a vast range of these devices, and solenoids are used to operate valves (air, water, gas, etc.) and many other functions in consumer and industrial equipment. Dishwashers and (clothes) washing machines are two common examples, using solenoid valves to turn the water on and off. Many up-market cassette decks of days gone by used solenoid control, with 'soft touch' buttons that required little or no force to operate.
Those mentioned are not time-critical, but industrial actuators often have to react within a specific time, and if slowed down excessively might mean that the machine will not operate properly, or will mangle the very products it's designed to build. Many years ago I watched a component insertion machine in action, placing through-hole components into a PCB. If any part of the system failed to operate at exactly the right time, the result was damaged components and places in the PCB where a part should have been, but wasn't. This happened for a variety of reasons, one of which was solenoid valves failing to release quickly enough. Most of the old through-hole insertion machines used pneumatic actuators, all driven by solenoid valves.
The pick-up and release times not only have to be as fast as possible, but more importantly they must be absolutely predictable. For this reason, a diode directly across the coil is generally the worst possible 'cure' for back-EMF, because it not only delays the release, it also slows down the released actuator so it may not achieve the required velocity to overcome any friction or sticking force (frequently referred to as 'stiction').
The vast majority of relays have contacts that break-before-make, which means that there is a short period where the NO and NC contacts are open when the relay is activated or deactivated. This isn't usually a problem, but it can cause issues with some circuits. One such application would be a speaker switch for a valve (vacuum tube) amplifier, as valve amps can react very badly if the output is open-circuit. This isn't an issue if there's no (or very little) signal, but if the amp is being driven hard (a guitar amp for example) it might be damaged during the open-circuit condition.
Make-before-break (Form D) relays are now uncommon. Omron used to make one (G2A-4L32A) but it's obsolete and I found no alternative. Before this section was published (October 2021) I found that there's virtually nothing that describes the 'all contacts open' condition. I ran a few tests on a couple of relays suitable for speaker switching to determine just how long the contacts are open (i.e. somewhere in between the fixed contacts). It's entirely up to the reader to decide whether this will constitute a problem in use. Mostly it does no harm, but there are applications where an open-circuit could cause damage.
The circuit shown was my test setup, and while the moving contact (connected to the relay's armature) traverses from the NC to the NO contacts (and vice versa), there can be no output across R1. A captured waveform is shown next, and it's unambiguous - there is an easily measured time when both contacts are open-circuit. The 'oscillations' you can see in the trace are caused by contact bounce, and all relays and switches are similarly afflicted.
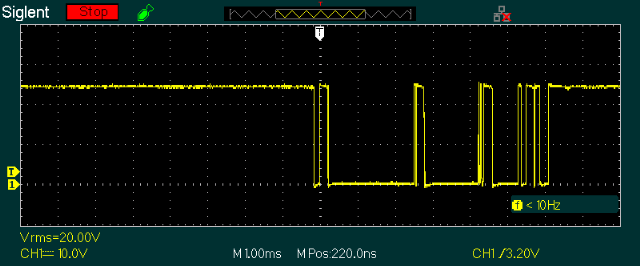
The two relays I tested were those shown Figure 1.2 (low cost SPDT and the octal base relay, but with 24V DC across the coil). The timing doesn't depend of whether the relay is being activated or deactivated, with both being roughly the same. A typical trace is shown above for reference, and after testing many times (and with both relays, plus a push-on, push-off footswitch) similar results are apparent with all. The 'break' time as the moving contact changes from one set of fixed contact to the other is surprisingly consistent, at around 6ms (including contact bounce period). It's possible to wire a pair of conventional relays to create a make-before-break circuit, but that will involve some electronics. It's not difficult to do, but make-before-break relays aren't something that many people want (as evidenced by the Omron version being obsolete with no replacement).
While the application is simple, it does require a power supply, and it is now a project (see Project 219 for details). It is basically suited to one application - changing speakers 'on the fly' with a valve guitar amp, because an open-circuit speaker connection can cause damage. It may not be open for long, but 6ms may well be enough time for a high-voltage 'flash-over' in the output stage. There's no need with a transistor amp, as they don't care if the output is open-circuit or not. With any make-before-break relay, there is a period when both output loads are connected in parallel. Valve amps don't care about this, but it may stress a transistor amp! If you happen to need a make-before-break relay for other applications, the details should allow you to adapt it to suit.
A somewhat obscure relay actuator does away with the electromagnet and uses a piezo-electric element to move the contacts. These require a high actuating voltage, which may be up to 400V. Unless the piezo element is fairly long, the total movement is small, so contacts must be very close together, so switching high voltages is impractical. There's very little information available, other than a few patents. I've not seen any mainstream manufacturer offering them.
The advantage (at least in theory) is that they will only draw a small current when operated (to charge the capacitance of the piezo element), and draw no current at all once the contacts are closed or opened. Don't expect to find one any time soon, but if you do, please let me know and send a photo. Like many other inventions, I have no doubt that these seemed like a good idea at the time, but they don't seem to have many practical applications. A little more info is available at the NASA website.
Something that most people don't have to think about is atmospheric pressure, since most of our projects will be used reasonably close to sea-level. If you're designing for something that's expected to be well above sea level you need to make allowances. Paschen's curve describes the breakdown voltage (usually of air) at various pressures, and if you have a product that will be used at 42km above the earth, the pressure is only 50mmHg (50mm Mercury, 50 Torr or 0.066 atmosphere). The dielectric strength of air at that pressure is only 320V/mm, reduced from 3kV/mm [ 9 ]. Most engineers will downgrade that to perhaps 1kV/mm to account for dust, high humidity, etc. In some cases the downgrade will be more, sometimes less, depending on the application.
If you're planning to design relays or spacecraft you need to know all the details, but this is just a brief mention of the topic. You'll need to gather a great deal of information if you have an esoteric use for relays, and you won't find it here.
Back when the telephone system was completely reliant on relays and rotary selectors, there was a vast amount of information available, but you had to be in the industry or you'd never find it. Although there is a lot of on-line archived documentation, much of the original stuff has disappeared. However, a serious search will turn up some gems from the past. An example is a 126 page document published in 1970, and covering 'post office' type 3000 relays. Every possible aspect of the design and specification is described in detail, covering coils, contacts, pull-in and release times, magnetic circuits, contact alignment and adjustment procedures, etc.
Almost all relays feature galvanic isolation, meaning that there is no conductive path between the drive coil or circuit and the switched load, and the input and output sections (and their connections) are physically placed so that all wiring can be kept separated. Note that some encapsulated reed relays may not provide acceptable physical isolation (known as creepage and/or clearance distances) to meet many standards, and can only be used with SELV or in circuitry that is not accessible to the user. The dielectric strength of many plastics falls at elevated temperatures, so keeping relays away from heat sources is a good idea.
With electromechanical relays, magnetism and a mechanical linkage are the media used to couple the input to the output, and it's done in a way that usually prevents most noise from being coupled either way. Solid state relays generally use infra-red light from an LED to either a photo-sensitive semiconductor junction or an array of (tiny) photo-voltaic cells. Isolation voltages range from a few hundred volts up to several kilovolts, and many electro-mechanical and SSRs carry certification for CE, UL, CSA, VDE and various other standards bodies worldwide.
Most relays are designed so that even catastrophic failure will not create a path between the two sections, so a traditional relay might have its contacts completely melted or have the coil burnt beyond recognition due to severe overheating, but the galvanic isolation remains and no current flows from the drive to the load or vice versa. In the same way, the infra-red LED might be blown to bits because it was connected across a 15V supply with no resistor, or the switching devices might fail due to a gross overload. Again, no current can pass the barrier. There are conceivably some faults that might cause a flashover (a lightning strike for example), but if that happens not much else survives either. When the transient has passed, the insulation will probably still be intact.
Coil back-EMF prevention is, perhaps surprisingly, one of the more complex areas with electromechanical relays and other solenoids. It's very common to see a diode used, and in simple, low power circuits it will be just fine. In many other cases the diode can cause problems that you wouldn't normally be expected to have thought about. Where fast de-activation is needed, you need to do much better than a diode, and using an additional series zener is a good solution. The budget version is to use a resistor, which isn't as good but will be acceptable in many applications.
If you do your homework, study datasheets and run some tests, you'll find a relay that will do just what you need. In some cases you'll find that a solid state relay is the best choice, but most of the time you'll quickly discover that an electro-mechanical relay is a far better option. In some datasheets and discussions you'll find that much is made of the high sensitivity of SSRs reducing wasted power, but in reality the switching semiconductors will often dissipate far more power than even the most insensitive electro-mechanical relay of similar load ratings. With any SSR, you must do your homework, and be aware of the many things that can go wrong. Also be aware that a fault in an SSR may cause damage to other equipment, even if it's not controlled by the SSR but just happens to be on the same mains feed.
As with everything in electronics, you will have to compromise somewhere. On the whole, conventional relays usually have fewer compromises than solid state versions, and offer far more flexible switching. With a mere half watt input, you can control 2kW or more with ease, and you can expect it to work for hundreds of thousands of operations, even at full load. Switching losses are minimal, no heatsinks are needed, and reliability is outstanding if you use the right relay for the job. Importantly for many people, electro-mechanical relays are far easier to get and usually much cheaper than a solid-state equivalent.
There are also many applications where nothing can beat a solid state relay. Complete freedom from arcing, which is really important in hazardous environments with flammable material, such as gas or fine suspended particles (powders, flour, etc.), exceptionally fast (SCR and TRIAC types) and predictable response times, and lack of contact bounce can be critical in some designs. The process of design is based on knowing the options that are available so you can choose the one that will work best in your project. There is no 'best' solution for all applications, and it's up to you to choose the solution with the smallest number of entries in the 'disadvantages' column.
Part 2 - Contacts, Arcing & Arc Suppression
1 Panasonic Small Signal Relay Technical Info. (Digikey)
2 Contact materials - The Relay Company
3 HV9901 PWM Relay Driver (Supertex)
4 Magnetic Reed Switches - Meder Electronics
5 Permanent Magnet Latching Relay - Wikipedia
6 Solid State Relays - Omega
7 Reed Sensors Vs. Hall Effect Sensors - Digikey
8 AppNote 0513 - Application of Coil Suppression with DC relays (TE Connectivity, Relay Products)
9 Breakdown Voltage - Wikipedia
| Main Index
Articles Index
|